Сфера мониторинга за радиационной обстановкой актуальна с того момента, как люди начали активно заниматься изучением электромагнитного излучения с чрезвычайно малой длиной волны. В процессе изучения и развития данной научной отрасли появились такие приборы, как гамма-дефектоскопы, уровнемеры, высотомеры, медицинские аппараты и т.д., которые в процессе своей работы производят данный вид излучения, одна из разновидностей которого, гамма-излучение, очень опасна для человека. Для регистрации этого вида излучения был разработан ряд приборов – дозиметров, основанных на различных принципах регистрации ионизирующего излучения.
Для более специализированных задач требуется более сложная аппаратура, которая представляет собой комплекс различных блоков детектирования для измерения мощности излучения, типа источника излучения, направление на источник и т.п. Перед прикладными разработчиками ставится задача по разработке и внедрению современных систем управления и статистических алгоритмов анализа данных для увеличения качественных характеристик разрабатываемой аппаратуры. Использование микропроцессорных систем управления позволяет решить эту задачу.
С точки зрения подхода к разработке регистрирующих устройств подобного рода существуют две группы используемых детекторов гамма-излучения – ионизационный и сцинтилляционный.
Рассматриваемый класс приборов основывается на детекторах на основе счетчика Гейгера–Мюллера [1]. Данный детектор представляет собой металлическую трубку, имеющую анод (металлическая нить внутри) и катод (корпус), заполненную разреженным газом (аргон, неон). При подаче высокого
(несколько сотен вольт) напряжения на анод внутри трубки начинают происходить процессы ударной ионизации (гамма-кванты выбивают электроны, попадая в стенки счетчика). Электроны, двигаясь в газе и сталкиваясь с атомами газа, выбивают из атомов электроны и создают положительные ионы и свободные электроны. Электрическое поле между катодом и анодом ускоряет электроны до энергий, при которых начинается ударная ионизация. Возникающая лавина ионов приводит к размножению первичных носителей, тем самым порождая токовый импульс, который регистрируется электроникой [2].
От схемы регистрации импульсов и принципов подачи высокого напряжения на счетчики Гейгера–Мюллера зависят характеристики прибора.
Несмотря на то, что сам детектор не претерпевал каких-либо серьезных изменений с момента изобретения, приборы для детектирования проходили определенные этапы развития вместе с развитием элементной базы, а также с появлением новых требований от пользователей данных приборов.
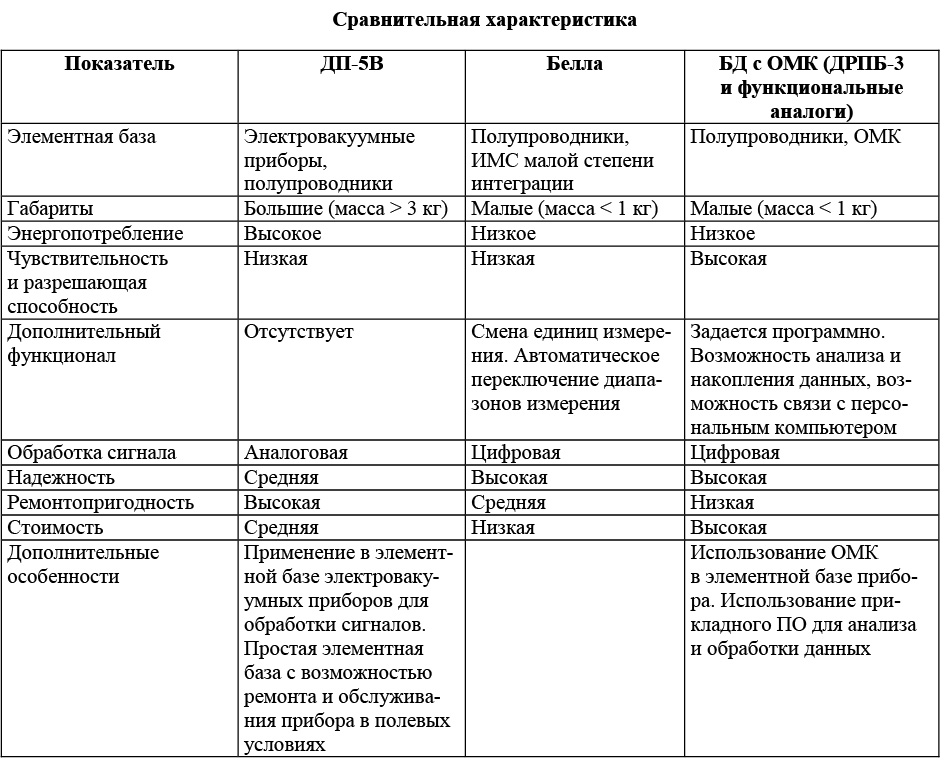
Выделим три этапа развития приборов детектирования.
- До активного внедрения интегральных микросхем (ИМС). Аналоговое отображение информации.
- Внедрение ИМС и цифровых шкал отображения информации.
- Внедрение однокристальных микрокомпьютеров (ОМК) для обработки информации и управления детектором.
Сравнительная характеристика приборов, произведенных согласно представленной выше поэтапной классификации, дана в таблице.
Применение микрокомпьютеров позволяет перейти на новый уровень программного управления и контроля детекторами, в том числе разработка интерфейса, функции и приоритеты доступности элементов управления, визуализация и представление данных, подсистемы регистрации и поддержки пользователя, внедрение интеллектуальных технологий и др. [3–5].
Приборы, созданные на современном этапе развития электроники, во многом превосходят своих предшественников по ряду показателей, таких как габариты, время автономной работы, чувствительность.
Однако такие приборы также имеют недостатки: высокая стоимость и низкая ремонтопригодность.
При разработке прибора немаловажен выбор конкретного типа ОМК, применяемого в схеме анализа и обработки данных. На сегодняшний день существует широкий выбор 8-, 16- и 32-разрядных ОМК с богатым набором функций и от большого количества производителей. При выборе ОМК учитываются следующие критерии:
– разрядность арифметико-логического устройства (АЛУ) и шины данных;
– встроенный объем ОЗУ и энергонезависимой (FLASH) памяти;
– рабочая тактовая частота;
– наличие встроенной периферии, такой как CAN-шина, интерфейс RS-232, USB, Ethernet и др., необходимой для обмена данными как между блоками детектирования, так и между блоками детектирования и ПЭВМ;
– поддержка распространенных средств разработки и отладки;
– качество технической поддержки производителя;
– качество прилагаемой документации.
Проведя анализ ряда ОМК различных производителей, был сделан выбор в пользу ОМК линейки STM32F4, выпускаемой компанией STMicroelectronics. Данная линейка ОМК как поддерживает универсальные отладочные аппаратные средства типа Keil ULINK2 и программные Keil MDK, так и имеет собственные, типа аппаратного модуля STLink/V2 c поддержкой бесплатного ПО – CooCox CoIDE [6].
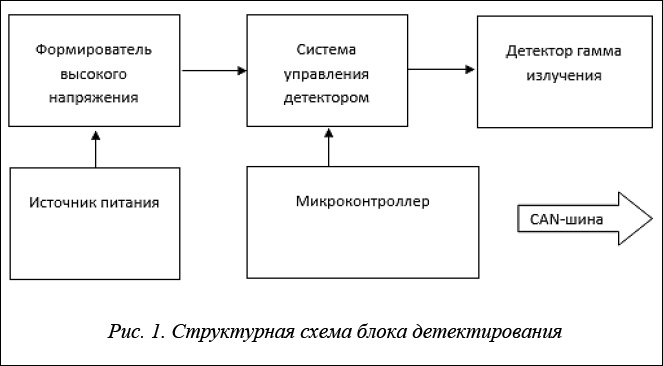 Рассмотрим работу блока детектирования с ОМК подробнее. Структурная схема блока детектирования изображена на рисунке 1. Блок состоит из следующих частей:
Рассмотрим работу блока детектирования с ОМК подробнее. Структурная схема блока детектирования изображена на рисунке 1. Блок состоит из следующих частей:
– формирователь высокого напряжения (ФВН);
– источник питания (ИП);
– детектор (Д);
– система управления (СУ);
– ОМК.
Принципиальная схема блока детектирования представлена в приложении. Перечисленные части отмечены цветами: ФВН – оранжевый, Д – синий, ОМК – красный, СУ – зеленый.
Передача информации и управление блоком детектирования осуществляются по стандарту промышленной сети типа Controller Area Network (CAN). Данный стандарт обеспечивает передачу данных по трехпроводной сети на скорости до 1 Мбит/сек. и расстоянии до 5 км (при снижении скорости передачи до 10 кбит/сек.). Допускается аварийный режим работы на пониженной скорости при обрыве одного из проводников сети.
Данный блок детектирования принципиально отличается от рассмотренных в таблице приборов с точки зрения схемотехники. Применение быстродействующего операционного усилителя (ОУ) типа AD8012 позволяет нормализовать зарегистрированный импульс по длительности и амплитуде. Данный ОУ обладает низким энергопотреблением (1,7 мА) при обработке высокочастотных сигналов до 350 МГц и небольшими габаритами. Это позволяет компактно разместить до 12 детектирующих каналов. В совокупности с использованием ОМК сигнальные выходы ОУ подключаются напрямую к ОМК, и дальнейшая обработка сигналов ведется программным способом. Это позволяет отказаться от громоздких триггерных схем на ИМС стандартной логики [7].
Еще одним отличием является использование CAN-шины для передачи данных и управления блоком детектирования. Управление блоком детектирования осуществляется по шине данных, согласно утвержденному протоколу обмена данными, либо с ПЭВМ, либо со специализированным пультом управления. С помощью этого же протокола происходит передача данных от блока детектирования на ПЭВМ.
Данное техническое решение предоставляет ряд преимуществ, в том числе
– достаточно высокую скорость обмена данными (до 1 Мбит/сек.);
– аппаратный контроль над целостностью переданных данных;
– возможность подключения нескольких блоков детектирования на одну шину передачи данных;
– возможность быстрого внедрения блока детектирования в измерительный комплекс с множеством различных измерительных приборов, управляемых с одного автоматизированного рабочего места.
Ключевой частью блока детектирования с ОМК в составе является ПО (программа), которое реализует математическую модель процесса детектирования и представляет собой ее программную интерпретацию. Дополнительно программа несет в себе функции сбора и приема/передачи данных и управляющих команд, а также занимается управлением внутренними электрическими цепями блока детектирования.
Рассматриваемая программа разделена на три функциональных блока:
– управление системой коммутации питания детекторов;
– подсчет полученных импульсов;
– реализация протокола обмена для передачи данных.
Управление системой коммутации питания строится на внутреннем таймере ОМК. Для расширения рабочего диапазона детектора питание на счетчики Гейгера–Мюллера подается в импульсном режиме. Данный режим обеспечивается широтно-импульсной модуляцией (ШИМ). Формирование ШИМ обеспечивается встроенным аппаратным таймером микроконтроллера.
Для принудительного гашения разряда на счетчике используется полумостовая схема включения с верхним и нижним ключами (рис. 2). Полумостовая схема содержит два полевых n-канальных высоковольтных транзистора, которые работают в ключевом режиме. Опционально присутствует микросхема-драйвер, не позволяющая одновременно включить оба ключа (защита от короткого замыкания в схеме). Многие ОМК содержат в себе программную часть управления подобными схемами, включая такую защиту внутри себя.

Применение данной схемы включения позволяет включать/выключать питание счетчика и снимать с него остаточный заряд (разряжать) с очень высокой скоростью.
Через верхний ключ подается высокое напряжение на счетчик в импульсном режиме, через нижний обеспечивается принудительная разрядка счетчика. ОМК типа STM32Fx имеет встроенный модуль управления полумостовыми схемами, обеспечивающий требуемую задержку между переключениями ключей (мертвое время) и не позволяет включать одновременно оба ключа (одновременное включение ключей приведет к короткому замыканию по высоковольтной части схемы). Это позволяет исключить из схемы специализированную микросхему драйвера, упростить схемотехнику и повысить надежность схемы. Задержка между переключением ключей задается программно и контролируется аппаратно ОМК.
Особенностью рассматриваемого блока детектирования является разделение счетчиков на две независимые группы в зависимости от управления питанием. Поскольку при регистрации счетчиком гамма-кванта осуществляется принудительное выключение питания счетчика, в идеальном варианте необходимо обеспечить независимое управление питанием каждого счетчика, однако подобная схема получается достаточно сложной с точки зрения схемотехники, а возможные получаемые преимущества не настолько весомы, чтобы вносить данные усложнения. В представленном варианте при срабатывании одного счетчика отключается вся группа (6 шт.). Это вносит определенные искажения в измерения (мертвое время счетчика), когда счетчик выключен и не может что-либо зарегистрировать. Данный фактор корректируется программно на этапе подсчета измеренных данных.
Подсчет зарегистрированных импульсов построен следующим образом. ОУ (выделено зеленым на схеме в приложении) нормализует токовый импульс по амплитуде и длительности (tимп. = 400 нс). Полученный импульс подается на вход внешнего прерывания ОМК. ОМК типа STM32F4 поддерживает до 16 входных линий внешних прерываний на один порт ввода-вывода [8].
Наличие большого количества входных сигнальных линий ОМК в совокупности с компактной аналоговой частью позволяет разместить значительное количество счетчиков (от 12 до 24) в корпусе прибора, тем самым значительно повысив его чувствительность.
Программа для обработки входных сигналов написана на языке СИ и записана во внутренней памяти ОМК. В ОЗУ ОМК создается массив данных, в котором индекс элемента – это порядковый номер детектора, а значение по этому индексу – количество зарегистрированных импульсов за заданный промежуток времени tизм (по умолчанию – 1 сек.).
Листинг кода обработки внешних линий прерываний на языке СИ:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
for(int i = 0;i<_SENSORS_COUNT;i++){
if(i<6){
if(GPIO_Pin == gpio_pins[i]){
TIM1->CNT = TIM1->CCR1;
SensorsData.sensorsCounter[i]++;
}
}
else{
if(GPIO_Pin == gpio_pins[i]){
TIM4->CNT = TIM4->CCR3;
SensorsData.sensorsCounter[i]++;
}
}
}
}
Данный листинг представляет реализацию следующего алгоритма. При срабатывании счетчика оцифрованный сигнал регистрируется ОМК. Внутри ОМК происходит аппаратное прерывание выполнения текущей программы, причем данное прерывание содержит информацию о порядковом номере той линии, сигнал на которой инициировал срабатывание прерывания (аргумент функции GPIO_Pin). По данному аргументу проверяется, к какой из групп принадлежит сработавший счетчик. Затем проверка внутри определенной группы выявляет конкретный порядковый номер сработавшего счетчика, отключает высоковольтное питание определенной группы и инкрементирует соответствующий полученному индексу элемент массива.
В процессе выполнения программы происходят постоянный подсчет зарегистрированных импульсов и запись их в массив данных. Внутренний таймер ОМК срабатывает каждый раз в указанное время измерения tизм, вызывая функцию обработки полученных данных.
Обработка полученных данных заключается в расчете мощности дозы на основе зарегистрированных импульсов за время tизм. Расчет мощности дозы производится по формуле
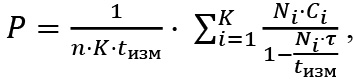
где P – искомая мощность дозы (мГр/ч); Ni – число импульсов на i-м счетчике за время измерения tизм;
Ci – поправочные коэффициенты для счетчиков; K – количество счетчиков; t – время отключения питания счетчиков (мертвое время); n – чувствительность счетчика.
Применение ОМК в составе прибора позволяет программно интерпретировать приведенную выше формулу расчета мощности дозы в достаточно гибком виде.
Приведем пример интерпретации данной формулы на языке СИ:
float Process_CalculateCurrentDoseRate()
{
uint8 i = 0;
uint8 time = 1; //время измерения – 1 секунда
float numerator = 0;
float denominator = 0;
float dose = 0;
float leftPart = 0;
float rightPart = 0;
leftPart = 1.0f / (SENS_RANGE_1 * 4 * time);
for(i = 0;i<4;i++){
numerator = sensorCnt[i] *
MainSettings.correctionFactors[i];
denominator = 1.0f - (sensorCnt[i] *
MainSettings.mDeadTime[0]);
rightPart = rightPart + (numerator / denominator);
}
dose = leftPart * rightPart;
return dose;
}
Гибкость заключается в программной настройке следующих параметров.
Мертвое время. Данный параметр зависит от количества счетчиков в группе и от времени выключения счетчика в схеме импульсного питания. Как правило, он определяется конструкцией прибора (количество счетчиков и количество групп), однако на практике требует незначительных корректировок на стадии окончательной калибровки прибора.
Чувствительность счетчика. Рассматриваемый прибор имеет несколько измерительных диапазонов. Каждый диапазон содержит в себе счетчики определенной чувствительности. Возможность изменения данного параметра делает формулу универсальной для любого типа используемого счетчика (для любого диапазона).
Поправочный коэффициент счетчика. Это один из ключевых параметров, влияющих на измерительные свойства прибора. Поскольку используемые счетчики являются аналоговыми приборами, несмотря на промышленное изготовление, они имеют достаточно большой разброс характеристик даже в рамках одной изготовленной партии. Для калибровки прибора и вводятся данные коэффициенты. Их расчет производится в рамках метрологической процедуры.
Метрологическая процедура представляет собой калибровку прибора на стендовой установке. Стендовая установка включает в себя калибровочный источник гамма-излучения и метрологическую линейку, позволяющую точно изменять расстояние между каждым счетчиком прибора и калибровочным источником. Мощность дозы от калибровочного источника заранее известна, поэтому можно рассчитать поправочный коэффициент для каждого i-го счетчика согласно формуле
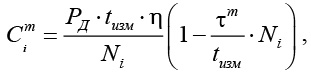
где PД – действительное значение МД, мГр/ч; остальные параметры аналогичны формуле расчета МД, приведенной ранее. Калибровка прибора выполняется однократно после изготовления. Использование поправочных коэффициентов позволяет реализовать приборы с практически одинаковыми характеристиками по регистрации гамма-излучения, несмотря на разброс характеристик используемых счетчиков. Возможность программного расчета и изменения данных коэффициентов позволяет производить оперативную калибровку прибора в рамках серийного производства.
После расчета значения мощности дозы оно упаковывается в требуемый, согласно протоколу, формат данных [9] и отправляется по CAN-шине на ПЭВМ для дальнейшей обработки.
Из представленного выше материала можно сделать следующий вывод: применение микропроцессорного управления позволяет увеличить качественные характеристики прибора-детектора, такие как чувствительность, время автономной работы, габариты, энергопотребление.
Помимо основных перечисленных преимуществ, применение ОМК в системе управления прибором позволяет добавить дополнительные функции, такие как пересчет единиц измерения, ведение журнала измерений в автоматическом режиме, запись результатов измерений на съемный носитель и т.п.
Использование цифровой системы управления позволяет управлять системой практически без ограничений. Применение ОМК позволяет повысить отказоустойчивость прибора за счет внедрения процедуры самотестирования системы и возможности различных аварийных режимов работы при неисправности каких-либо из каналов (отключение неисправных каналов при выходе счетчика из строя).
Ключевыми недостатками применения ОМК в составе прибора являются высокая стоимость прибора, пониженная радиационная стойкость, низкая ремонтопригодность. Для компенсирования данного недостатка требуется либо дополнительное экранирование, либо применение специализированных радиационно-стойких компонентов, что накладывает ряд ограничений с точки зрения как уже существующей схемотехники прибора, так и разработанного ПО.
Литература
- Сидоренко В.В., Кузнецов Ю.А., Оводенко А.А. Детекторы ионизирующих излучений. Справочник. Л.: Судостроение, 1984. C. 10–19.
- Болоздыня А.И., Ободовский И.М. Детекторы ионизирующих частиц и излучений. Принципы применения. Долгопрудный: Интеллект, 2012. C. 24–28.
- Жук Ю.А., Фомин В.В., Уткин Л.В. Определение рефлексивных показателей для оценки эффективности использования дисплейных форм наглядности // Изв. РГПИ им. А.И. Герцена. 2011. № 138. С. 84–94.
- Фомин В.В., Миклуш В.А. Интеллектуальные информационные системы. СПб: Изд-во РГГМУ, 2013. 148 с.
- Никольский Б.Б., Фомин В.В Перспективы использования нейронных сетей во встраиваемых системах на примере спектроскопии. В сб.: Некоторые актуальные проблемы современной математики и математического образования // Герценовские чтения-2015: матер. 68-й науч. конф. СПб: Изд-во РГПУ им. А.И. Герцена, 2015. С. 206–209.
- Разработка и проектирование встраиваемых систем. URL: http://www.st.com/en/microcontrollers.html (дата обращения: 1.04.2017).
- AD8012 Dual 350 MHz Low Power Amplifier. URL: http://www.analog.com/media/en/technical-documentation/data-sheets/AD8012.pdf (дата обращения: 1.04.2017).
- The Insider’s Guide To The STM32 ARM Based Microcontroller. UK: Hitex Publ., 2008.
- Электронные текстовые данные URL: https://en.wikipedia.org/wiki/CAN_bus (дата обращения: 1.04.2017).

Comments