Обработка радиолокационной информации (РЛИ) – процесс приведения информации, получаемой
с одной или нескольких радиолокационных станций, в пригодный для дальнейшей передачи вид.
В многопозиционных радиолокационных станциях обработка РЛИ проходит в три этапа:
– первичная обработка, обеспечивающая обнаружение сигнала цели и измерение ее координат с соответствующими качеством или погрешностями;
– вторичная обработка, предусматривающая определение параметров траектории каждой цели, включая операции отождествления отметок целей;
– третичная обработка, объединяющая параметры траекторий целей, полученных различными приемными устройствами с отождествлением траекторий.
Все эти этапы важны и необходимы для создания полной картины воздушной обстановки.
Одним из наиболее эффективных средств разведки воздушных и наземных целей являются авиационные комплексы радиолокационного дозора и наведения (АК РЛДН). Существующие комплексы оптимизированы для выполнения определенного числа оперативно-тактических задач.
Авиационные комплексы предполагается применять в качестве основного звена в создаваемых информационно-управляющих системах.
Процессы планирования применения и непосредственного управления войсками, силами и средствами требуют непрерывного слежения за воздушно-космической, наземной и морской обстановкой и обеспечения надежного управления имеющимися войсками, силами и средствами в различных регионах планеты в масштабе времени, близком к реальному. Одним из наиболее эффективных способов решения этих задач является дальнейшее развитие существенных систем разведки и управления вооруженных сил и объединение их в единую унифицированную информационно-управляющую систему разведки, оповещения и управления [1].
Существующие методические подходы [2, 3] касаются общих вопросов сбора и обработки РЛИ, но не учитывают вариант взаимодействия двух АК РЛДН в системе «ведущий–ведомый» (рис. 1).

Особенность данной системы в том, что РЛИ поступает на борт ведущего авиационного комплекса для последующей обработки и анализа. Такой подход позволяет получить преимущество при работе в сложной помеховой обстановке. В связи с этим актуальна разработка вариантов взаимодействия АК РЛДН.
Цель авторов статьи – достичь повышения полноты и точности информации о складывающейся воздушной обстановке в зоне действия двух АК РЛДН.
Под полнотой информации о воздушной обстановке понимается минимальный, но достаточный набор данных для принятия правильного решения о сопровождения цели, под точностью – степень близости полученной информации о воздушной обстановке к реальному состоянию.
Главная цель АК РЛДН – оценка воздушной, воздушно-космической, наземной и надводной обстановки в зоне ответственности, распознавание намерений противника [2–5]. Достижение ее возможно за счет объединения РЛИ от нескольких источников.
Алгоритмы сбора и обработки информации предназначены для формирования обобщенной воздушной обстановки, складывающейся в зоне действия (ответственности) АК РЛДН, по информации, поступающей от различных источников с трассовым выходом. Обобщенная воздушная обстановка представпредставляет собой определенным образом упорядоченную информацию о положении, параметрах движения воздушных объектов (ВО) (целей) и признаковой информации [3].
Информация о трассах, выдаваемая источниками РЛИ, записывается и хранится в массивах трасс источников, число которых равно количеству источников информации.
Трассы, поступающие от конкретного источника информации, в дальнейшем описании также будут называться частными. Трассы, сформированные в процессе объединения частных трасс, по одному ВО
в дальнейшем будут называться обобщенными.
Исходными данными при формировании обобщенной воздушной обстановки являются трассы целей, полученные в результате вторичной обработки от взаимодействующих АК РЛДН, и координаты источников РЛИ [3].
РЛИ от ведомого АК РЛДН поступает в сообщениях о ВО, которые передаются на ведущий АК РЛДН и содержат следующие основные признаки и параметры, необходимые для работы алгоритма обработки:
– номер цели (№ ц);
– номер траектории цели (№ к);
– плоскостные координаты ВО (Xц, Yц);
– скорость (Vц);
– признак сопровождения (СОПР).
Исходные данные по АК РЛДН: ведущий – X1, Y1, V1, H1, Q1, ведомый – X2, Y2, V2, H2, Q2.
РЛИ от источников информации поступает в сообщениях о ВО, которые передаются на ведущий АК РЛДН в темпе, установленном в соответствии с протоколами функционального взаимодействия, и содержат следующие основные признаки и параметры, необходимые для работы алгоритмов обработки.
Номер цели, представляющий собой идентификатор конкретного ВО в потоке сообщений, поступающих от одного АК РЛДН. Номер цели может поступать в системе номеров источника или ведомого АК РЛДН.
Номер группы, сообщаемый при передаче информации о групповой цели. В этом случае передаются координаты головного ВО, группе присваиваются параметры движения головного ВО, а также передаются контур группы, аппроксимированный до прямоугольника, и координаты его центра.
Признак сопровождения, выдаваемый источником по результатам обработки ВО, который может принимать следующие значения:
– новая трасса;
– временное прекращение выдачи по трассе;
– координаты экстраполированы;
– обновление по координатам X, Y, Z;
– прекращение выдачи по трассе;
– сброс трассы с сопровождения.
Кроме того, обработке подлежат сообщения о местоположении, взаимодействии и загрузке, поступающие от источников информации.
Сообщения о местоположении используются для расчета сменных величин, необходимых при пересчете координат, поступающих от ведомого АК РЛДН в систему координат ведущего АК РЛДН [3].
Выходными данными алгоритма сбора и обработки РЛИ являются трассы, сформированные в процессе объединения частных трасс, по каждому ВО и оценка дисперсий по координатам и компонентам скорости.
Алгоритм объединения РЛИ от взаимодействующих АК РЛДН включает следующие основные задачи (рис. 2):
– прием РЛИ, поступающей от взаимодействующих АК РЛДН с трассовым выходом (частных трасс) (блоки 1, 2);
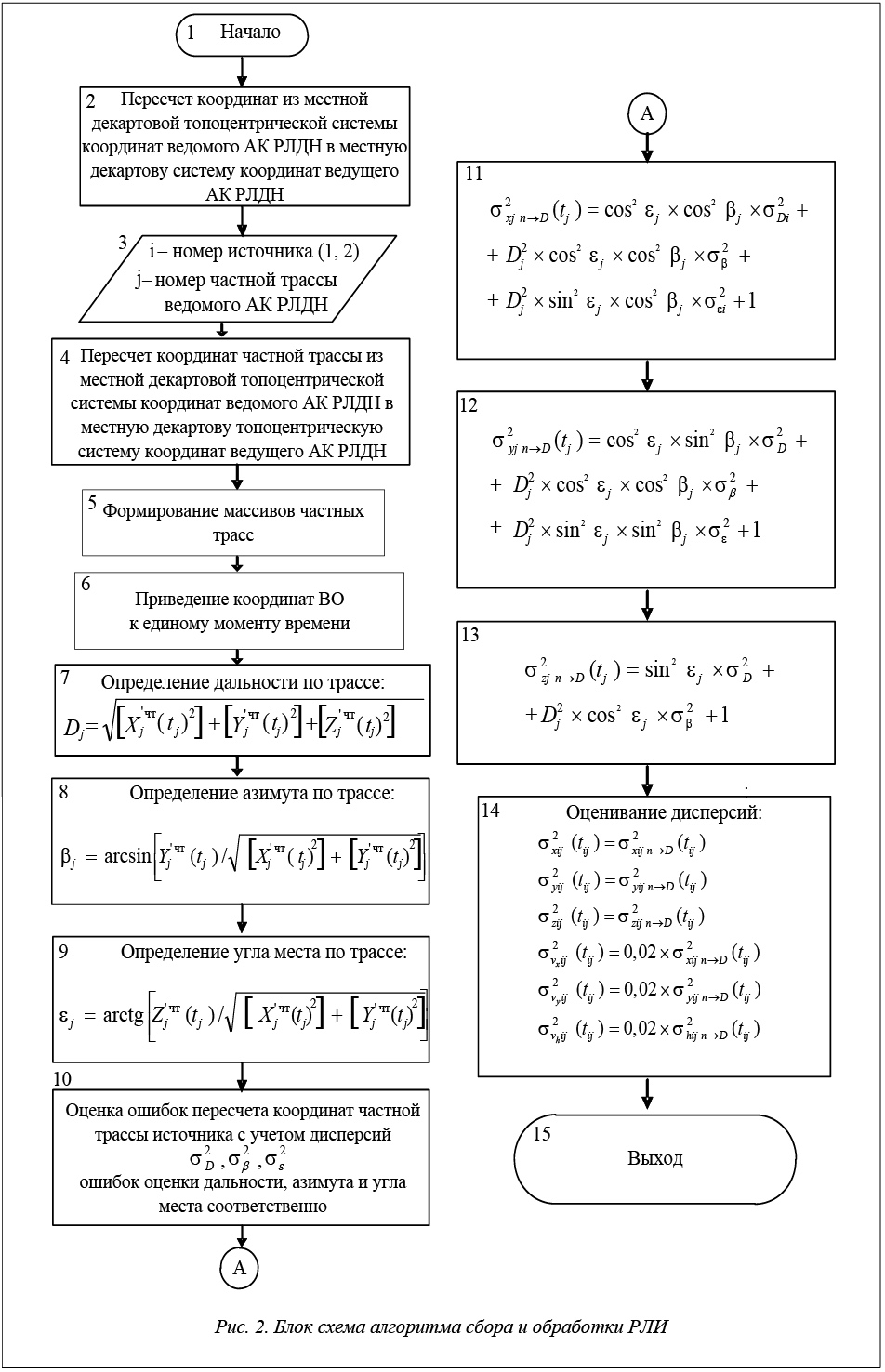
– пересчет координат ВО в единую систему координат, приведение информации, поступающей
от взаимодействующих АК РЛДН, к унифицированному виду (блок 4);
– формирование массивов частных трасс (блок 5);
– приведение координат ВО к единому моменту времени (блок 6);
– определение дальности, азимута, угла места по трассе (блоки 7–9);
– оценка ошибок (блоки 10–13);
– оценивание дисперсий по координатам частной трассы и компонентам скорости (блок 14).
Результаты работы алгоритма сбора и обработки информации от взаимодействующих АК РЛДН необходимы для проведения третичной обработки информации.
Основными процедурами алгоритма объединения информации от двух взаимодействующих источников являются следующие:
– сбор результатов вторичной обработки информации в виде отдельных траекторий от взаимодействующих АК РЛДН;
– пересчет сменных величин для расчета коэффициентов, необходимых для преобразования координат из местной декартовой топоцентрической системы координат в местную декартову топоцентрическую систему координат относительно реперной точки и обратно;
– подтверждение ранее принятого решения на отождествление частной и обобщенной трасс;
– обобщение координатной и признаковой информации;
– фиксация пропуска отождествления.
С помощью математических методов информация уточняется и дополняется, повышаются полнота данных и устойчивость сопровождения целей, а также оптимизируется работа группировки радиолокационных средств с целью получения РЛИ максимального качества с минимальным расходом ресурсов
с учетом обстановки и используемых средств.
При отсутствии в сообщении признаков сброса или прекращения выдачи производится пересчет координатной информации из системы координат ведомого АК РЛДН в систему координат ведущего АК РЛДН с учетом реперной точки.
Таким образом решается задача сопоставления информации, полученной от нескольких источников. Следующим этапом является третичная обработка информации.
Результаты работы алгоритма сбора и обработки информации передаются на вход алгоритма третичной обработки информации.
Алгоритм третичной обработки информации организует перебор источников, информация от которых была принята и обработана за текущий период с целью захвата обобщенных трасс на сопровождение.
Исходные данные алгоритма третичной обработки информации – трассы, сформированные по каждому ВО, полученные в результате работы алгоритма объединения информации.
Выходные данные алгоритма третичной обработки информации – трассы целей, полученные при отождествлении частных трасс от двух АК РЛДН.
Решаемые задачи:
– отождествление частных трасс между собой;
– формирование выходной информации;
– оценка воздушной обстановки в зоне ответственности.
Алгоритмы отождествления подключаются по каждому сообщению о частной трассе, которая
не сбрасывается с сопровождения.
Общая блок-схема алгоритма третичной обработки информации представлена на рисунке 3.
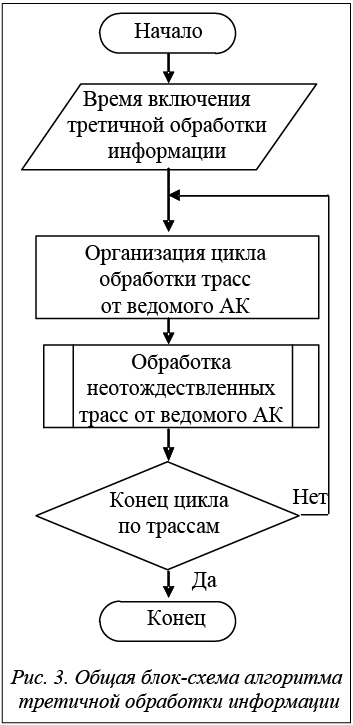
В блоке обработки неотождествленных трасс от ведомого авиационного комплекса реализуется
захват частных трасс на сопровождение. В результате захвата образуется новая обобщенная трасса или устанавливается новая связка частной и ранее сопровождающейся обобщенной трассы.
Входными данными для блока обработки неотождествленных трасс от ведомого авиационного комплекса является время включения обработки.
Обработка неотождествленных трасс от ведомого авиационного комплекса обеспечивает решение следующих задач:
– проверка наличия обновленной информации за текущий период;
– организация отождествления частных трасс источника
с имеющимися на сопровождении обобщенными трассами;
– захват новых обобщенных трасс и организация формуляра новой трассы.
В случае, когда информация ведомого авиационного комплекса не обновлялась (поступили сбойные сообщения или сообщения с признаком сопровождения «сброс»), обработка не производится.
Для организации отождествления трасс источника с обобщенными трассами производится передача на вход алгоритма отождествления всех обработанных за текущий период частных трасс. В дальнейшем в ходе работы алгоритма производится обработка частных трасс, которые не отождествились
с имеющимися трассами.
При отождествлении рассматриваются все возможные связки. После предварительного отождествления производятся выделение обособленных (непересекающихся) связок и их анализ.
Проводится контроль физической реализуемости с целью исключения из обработки сбойных сообщений. При контроле проверяется попадание содержащихся в сообщении параметров и признаков в область их возможных значений. При наличии во входном сообщении сбойных параметров его дальнейшая обработка не проводится.
В целях обновления информации, содержащейся в массиве трасс источника, устанавливается связка между пришедшим сообщением и формуляром массива трасс источника. Число массивов равно числу сопрягаемых с ведущим АК РЛДН источников, их размер соответствует максимальной производительности источника. Установление связки осуществляется по номеру ВО.
При наличии связки частной и обобщенной трасс проверяется ранее принятое решение об отождествлении. Решение принимается на основе сравнения значения разности приведенных к одному моменту времени координат частной и обобщенной трасс с размером строба отождествления. Размер строба выбирается в соответствии с рассчитываемой оценкой точности оценивания координат частной и обобщенной трасс, в том числе с учетом вырабатываемых при обработке или получаемых от источника признаков маневра частной трассы по соответствующим координатам.
При превышении разностью координат величины строба подтверждения принимается решение о неподтверждении трасс, обновление информации не производится, значение счетчика неотождествления увеличивается на 1. При превышении значения счетчика порога производятся удаление связки частной и обобщенной трасс, а также чистка соответствующей информации по рассматриваемой трассе источника.
В случае подтверждения ранее принятого решения на отождествление выполняется обновление параметров обобщенной трассы (координатной и признаковой).
Алгоритм отождествления трасс источника с обобщенными трассами обеспечивает решение следующих задач:
– проверка выполнения условий отождествления частных и обобщенных трасс;
– формирование матрицы отождествлений;
– разбор конфликтных ситуаций отождествления (установление однозначного варианта привязки).
На первом этапе работы алгоритма организуется последовательный попарный перебор массивов трасс источников. При этом для каждой пары проверяется выполнение условий отождествления. Результаты отождествления заносятся в единичную матрицу отождествлений. Число строк матрицы равно
числу частных трасс, столбцов – числу обобщенных трасс. При выполнении условий отождествления соответствующему элементу матрицы присваивается 1. Кроме того, не производится отождествление реальных и эталонных (тренажных) трасс.
На втором этапе осуществляется работа с матрицей отождествления с целью установления однозначного варианта привязки частной трассы к обобщенной. Для этого последовательно просматриваются строки и столбцы матрицы с целью формирования обособленных связок частных и обобщенных трасс.
В дальнейшем выделенные связки анализируются и обрабатываются. Возможные конфликты выделяются в следующие четыре варианта:
– одной обобщенной трассе соответствует одна частная (отсутствие конфликта);
– одной обобщенной трассе соответствуют несколько частных (простой конфликт);
– одной частной трассе соответствуют несколько обобщенных (простой конфликт);
– нескольким обобщенным трассам соответствуют несколько частных (сложный конфликт).
В случае отсутствия конфликта (однозначное отождествление) производятся привязка частной трассы к обобщенной и корректировка связки трасс.
Для разбора простых конфликтов осуществляется расчет «веса» обобщенной траектории с учетом привязки. Расчет «веса» проводится с использованием метода максимального правдоподобия. В качестве наилучшего варианта выбирается тот, который обеспечивает наибольший вес обобщенной трассе. Дальнейшая обработка производится аналогично вышеописанной.
Наиболее трудным для обработки является последний вариант – сложный конфликт. Разрешение данного конфликта выполняется в следующей последовательности.
Осуществляется подсчет числа отождествлений для каждой частной трассы связки. Выбирается частная трасса с наименьшим числом отождествлений.
В случае наличия единичного отождествления определяется номер отождествленной с ней обобщенной трассы. Далее организуется просмотр всех отождествленных с данной обобщенной трассой частных трасс. Выделяются все частные трассы, имеющие единичные отождествления с данной обобщенной. По выделенным трассам рассчитываются «веса» обобщенной трассы с учетом отождествления с частными. Далее производятся выбор отождествления с наибольшим «весом», обновление координатной и признаковой информации, заполнение массива обобщенных трасс. Рассмотренные трассы исключаются
из дальнейшего рассмотрения, осуществляется работа по обновленной связке.
В случае отсутствия в обособленной связке частных трасс с единичным отождествлением организуется цикл по всем обобщенным трассам, производятся расчет «весов» и выбор варианта отождествления обобщенной трассы с наибольшим «весом». Далее организуется цикл по всем частным трассам связки, имеющим отождествление с выбранной обобщенной трассой, производится расчет «весов» и выбирается вариант отождествления с наибольшим «весом». В случае выбора этой же частной трассы принимается решение об отождествлении и производятся обновление координатной и признаковой информации, заполнение массива обобщенных трасс. Рассмотренный вариант привязки (частная и обобщенная трассы) исключается из дальнейшего рассмотрения, далее производится работа по обновленной связке.
В случае несовпадения номеров частная трасса с наименьшим отождествлением исключается из связки, далее производится работа по обновленной связке.
Трассы целей, полученные при отождествлении частных трасс от двух АК РЛДН, поступают на выдачу в виде зон обобщенных трасс на текущий момент времени.
Таким образом, в алгоритме сбора и обработки информации с помощью математических методов информация уточняется и дополняется, повышаются полнота данных и устойчивость сопровождения целей, а также оптимизируется работа группировки радиолокационных средств с целью получения РЛИ максимального качества с минимальным расходом ресурсов с учетом обстановки и используемых средств.
В алгоритме третичной обработки информации реализуется объединение частных трасс в обобщенные (отождествление), разрешаются конфликты и устраняется дублирование информации.
Для формирования выводов о качестве работы алгоритма третичной обработки информации необходимо сравнить сформированную обобщенную информацию с эталонной.
Литература
1. Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Ягольников С.В. Метод конфликтно-устойчивого выбора режима функционирования радиотехнического комплекса в изменяющихся условиях // Радиотехника. 1996. № 11. 12 с.
2. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Принципы построения, проблемы разработки и особенности функционирования: монография. М.: Радиотехника, 2014.
528 с.
3. Вайпан С.Н., Васильев А.В., Король В.М., Силкин А.Т. Требуется комбинированная система испытаний МАК РЛДН // Воздушно-космическая оборона. 2013. URL: http://www.vko.ru/oruzhie/trebuetsya-kombinirovannaya-sistema-ispytaniy-mak-rldn/ (дата обращения: 10.04.2017).
4. Макушев И.Ю. Концептуальные положения применения беспилотных летательных аппаратов для дальнего радиолокационного обнаружения летательных аппаратов // Радиооптические технологии в приборостроении: матер. XI Всерос. науч.-технич. конф. М.: МН ТОРЭС им. А.С. Попова, 2015. С. 6–13.
Комментарии