A sensor network is a system of spatially distributed sensor nodes that interact with each other and with the information and communication technology (ICT) infrastructure (if applied) to receive, process, provide information about real conditions and, if necessary, respond to such information.
Nowadays, sensor networks are involved in solving such problems as detecting, classifying and tracking objects in real conditions. The sensor node data can be pre-processed and modified by a reading or other node. Depending on the application, intermediate data such as characteristics or design parameters can be extracted from the acquired data during preprocessing. The preprocessing results can be distributed among sensor nodes in a sensor network. Once distributed, intermediate data from multiple sensor nodes can be converted into context and situation information by merging the data.
Sensor networks can consist of various types of sensors, such as seismic, magnetic field, thermal, infrared, acoustic, which are able to measure a wide variety of environmental conditions: temperature, humidity, pressure, noise level, dynamic characteristics such as speed, direction and an object size. the nodes can be used for continuous sensing, detection and identification of events.
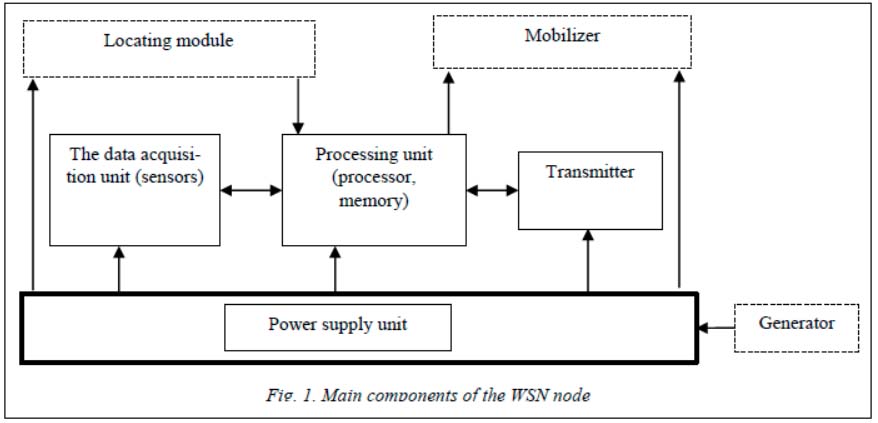
A sensor network node consists of four main components, as shown in Figure 1: a data acquisition unit, a processing unit, a transmitter, and a power supply unit. Depending on the network application, there might be additional units, such as locating modules, a power generator and a mobilizer. The data acquisition unit usually consists of two parts: sensors and an analog-to-digital converter (ADC). The analog signal generated by the sensor based on the observed phenomenon is converted into a digital signal via ADC and then goes to the processing unit. The processing module uses the integrated memory and manages the procedures that allow performing the assigned monitoring tasks together with other nodes. The transmitter unit (transceiver) connects the node to the network. One of the most important node components is the power supply unit. It can be rechargeable, for example using solar panels.
The node size can be extremely small. There are some other hard restrictions on the nodes aside from the size. They must:
• consume very little energy,
• work with a large number of nodes at short distances,
• have a low production cost,
• be autonomous,
• adapt to the environment.
Practice shows that since the nodes can become inaccessible, the sensor network functionality depends on two key factors: the power supply of individual nodes and the presence of a sufficient set of processed data in each mote to exchange reliable information [1]. Let us consider these factors in more detail.
Power supply is a limited resource due to size limitations. The node data transmission module can be a passive or active optical device as in a smart node or a radio frequency (RF) transmitter. RF transmission requires a modulation module that uses a certain bandwidth, a filtering and demodulation module, which makes them more complex and expensive. In addition, data transmission losses between two nodes are possible due to the fact that the antennas are located close to the ground. However, radio communication is preferred in most existing sensor network projects, since the data transmission frequencies are low (typically less than 1 Hz) [2] and the transmission cycle rates are high due to short distances. These characteristics allow using low radio frequencies. However, designing energy efficient and low frequency radio transmitters is still technically challenging. Although today processors are constantly decreasing in size and increasing in power, the data processing and storage is still a weak point of a node.
There are many ways to reduce the energy consumption of sensor nodes including the use of processors with low power (potentially lower speed), limiting the communication range and bandwidth of radio communication channels, limiting the capacity of local storage, the use of efficient data processing algorithms and switching sensor nodes to the sleep mode according to the schedule. It is also possible to extend the battery life for the sensor assembly by using energy storage devices. Lifetime can be maximized by distributing processing tasks among the sensor nodes to balance power consumption and energy availability so that no sensor node fails significantly earlier than others, even if such reallocation increases the total power consumed by the entire network.
Energy efficient routing schemes are in high demand in self-organizing sensor networks with limited resources.
A wireless node is a microelectronic device, so it can only be equipped with a limited power supply (<0.5 A, 1.2 V). In some cases, replenishment of energy resources may be impossible. Therefore, the node lifetime is directly related to the battery charge. In a network with each node playing the role of data collection and router, the failure of multiple nodes can lead to significant changes in the network structure and may require re-forwarding of packets and network reorganization. Thus, energy conservation and power management are an additional factor. Due to this reason researchers are currently focusing on developing energy-efficient protocols and algorithms for sensor networks. In sensor networks, energy efficiency is an important performance parameter that directly affects the network life. The use of specific protocols can be a compromise due to a decrease in other performance metrics (such as increased response time and decreased throughput). The main tasks of the node are to detect events, perform fast data local processing, and transfer data. Hence, energy is consumed in three stages: data acquisition, data processing, and communication with other nodes. The power supply unit is selected depending on the node application nature. Periodic data acquisition consumes less energy than continuous monitoring. The difficulty of detecting events also plays an important role in energy consumption. A high level of ambient noise can cause significant detection difficulties.
The node consumes maximum energy for communication, which involves both transmission and reception of data. We can say that short-distance communication with low radiation power requires approximately the same amount of energy for transmission and reception. Frequency synthesizers, voltage control oscillators, locking phases (PLL) and power amplifiers require energy that is limited in resources. It is important that we do not consider only the active power in this case, we also consider the power consumption when starting the transmitters. The transmitter starts up in a fraction of a second, so it consumes negligible amounts of power. This value can be compared with the PLL lock time. However, as the transmitted packet decreases, the starting power begins to dominate the power consumption. As a result, it is ineffective to turn the transmitter on and off all the time since most energy will be spent on just that.
Data processing consumes significantly less power than data transmission. The example described in [3] illustrates this discrepancy. Based on Rayleigh's theory that a quarter of the power is lost during transmission, we can conclude that the power consumption for transmitting 1 KB over a distance of 100 m will be about the same as for executing 3 million instructions at a speed of 100 Million Instructions Per Second (MIPS)/W by a processor. Consequently, local data processing is critical to minimizing energy consumption in the sensor network. Therefore, the nodes must have built-in computing capabilities and be able to interact with the environment.
If several WSN units fail, the problem of reliable processing and transmission of data on the environmental state arises. Thus, there is a task of creating a general vision of the environment by nodes to create a reliable model of the situation in the responsibility area. It is necessary to intellectualize the control system for data collecting and processing and controlling the node.
In addition, network throughput only slightly increases depending on the number of vertices. The most appropriate way to solve this situation is to reduce the data flow through the network by adding distributed hierarchical data processing within the network and transmitting only relevant responses to the user’s request. There is a wide range of different algorithms for implementing this processing depending on the data type and generalization level. But in traditional models of distributed hierarchical processing, each algorithm is rigidly associated with the corresponding vertex within a given network topology. When the network topology changes, it is necessary to reprogram the vertices due the transfer of large amounts of program code over the network.
Nowadays, these problems are solved using fuzzy logic approaches, which are a set of information processing methodologies that allow working with inaccurate, uncertain and fuzzy data and providing the construction of sufficiently interpretable models. Such methods are also necessary for WSN due to the fact that there are no accurate analytical models of information processing in WSN.
To solve these problems, the papers [4,5] propose to create a universal high-level interface for a smart node of a wireless sensor network and to use fuzzy smart sensors wsn technology to intellectualize decision support systems in WSN.
To implement a high-level general-purpose interface, the authors propose to install fuzzy inference systems on the wireless sensor network node. The main part of such node is a fuzzy inference system, which consists of a knowledge base (a set of fuzzy inference rules based on linguistic variables), a fuzzification and defuzzification modules that translate the actual variable values into terms and vice versa. A smart node can approximate any function of the input parameters. Fuzzy rules can also be used for aggregation, routing, clustering, data merging, which reduces network energy costs. Fuzzy rules for a network can be made by an expert or using fuzzy neural networks.
To solve the problem of creating a universal form for representing transmitted data and rules, the authors propose to use an XML-based markup language. It allows a wireless sensor network to interact with external applications in a platform-independent way.
To work with the XML language, there is a formulated data and knowledge transfer model and defined requirements for an XML parser used to parse XML messages.
The parser is built into the smart sensor node model.
Despite the convenience of using commands to control a fuzzy controller in XML format, there is a problem of a large amount of transmitted data when using this approach. This is because the XML is a text format.
Thus, to ensure the flexibility of universal interfaces for wireless sensor networks and ensure the long-term operation of the network itself, it is necessary to use the XML format of fuzzy controller control commands for interaction between the client application and the network root node (the network node connected to the computer). It is also necessary to use the binary command format for transmission data within the network.
The XML command is transmitted to the root node via the COM port, parsed using the parser and converted into a binary format, and then it is sent over the radio node with the fuzzy controller installed.
This approach may not fully meet the autonomy and energy saving requirements in certain tasks since expert and self-learning systems consume much more resources.
Strict requirements in a number of subject areas for response time, memory size, microchip speed and power consumption require the use of relatively simple algorithms built by describing the best human experience when performing functional tasks. The papers [6,7] show that such description works if situations and successful methods of action in real conditions for the formation of behavior models (patterns) are identified.
The paper [6] gives the following generalized logical scheme for describing a pattern
Pattern name:
since [motives M]
since [goals G]
if [preconditions U’] (1)
then the mode of action [rq(t)]
because of that [postcondition U”]
...
there is an alternative [rp(t)]
All components in this model, except for logical connectives, can be language constructs in natural or natural-professional language. Therefore, model (1) is a typical natural language pattern model.
The paper [6] gives a formal model of a behavioral pattern in a typical situation. It is also shows that it is possible to formalize the domain model and the decision-making model of a person under time pressure using fuzzy production networks.
Motives in the model (1) are reasons driven by needs and/or obligations. They induce an agent to the activity that requires a pattern. The description of motives and goals in the model (1) represents the context of repeated pattern application from the standpoint of necessity and the possibility of its application (needs → motives → goals). The context is determined by the expected postconditions. Postconditions are associated with the goals that requested the pattern, but reflect them in the form of a possible state after the pattern application. Goals define the desired state and can be a reason for determining the necessity and usefulness of striving to achieve them. The mode of action is a code as a natural language description of the action scheme, the implementation of which leads to the execution of the pattern. Such description has the form of techniques in a programming language. A set of models or behavioral patterns form its carrier’s experience or knowledge base.
The model of an autonomous node individual behavior assumes the formation of a pattern base based on experimental experience. It makes enables the evolution of cooperative intelligence using an artificial cognitive process similar to that of natural entities. Note that this possibility is absent in knowledge-based systems since it lacks a computer model of adaptive behavior.
The general architecture of the WSN intelligent control system has a hierarchical structure (Figure 2).

The upper level implemented by the operator corresponds to such properties as survival, safety, fulfillment of obligations according to the mission, accumulation and adjustment of the knowledge base in the form of effective behavior patterns. Its controlled object is WSN considered as some functional system. It performs: 1) calculation of current specific value indicators based on results and efficiency at the moment t; 2) calculation and implementation of the mode of action (behavior) at the moment t according to a given behavioral pattern; 3) monitoring the results of the behavioral pattern implementation.
The operator works through behavioral patterns in a typical situation during the mission and performs a mission analysis. The node calculates the state sequences y(t), implements mission tasks and calculates the assessment of the specific value and efficiency [8,10] of working out actual situations.
This approach to modeling the behavior of nodes in a network based on patterns is similar to the approach in pragmatic epistemology, which considers knowledge as a set of theories or models, each of which is a description of the behavior when solving a certain class of problems. Theories that describe a class of phenomena can “overlap” and cause the problem of choosing a method for solving problems in a particular subject area. The selection criterion is the expected specific value of a possible result [9].
The process of obtaining knowledge in the proposed scheme is similar to the process of a biological evolution. Consequently, the criterion of the truth of knowledge of an artificial entity is the knowledge fitness for solving subject area problems.
A data model . The implementation of this approach is related to: 1) the correct correlation of the situation coordinate vector  with one or another pattern, both in terms of their number and in the form of presenting each coordinate; 2) the completeness of the description of the situation by the vector (n is the number of parameters taken into account). The connection between a particular class and a particular pattern is established when working with a leader who is a real knowledge holder. The corresponding technique is described in [9]. Since a person describes a situation using natural language means, then situational vector coordinates are linguistic variables. They are used to convert quantitative scales in sensors into linguistic scales used by a person to describe the values of an observed parameter-concept in the form of terms.
with one or another pattern, both in terms of their number and in the form of presenting each coordinate; 2) the completeness of the description of the situation by the vector (n is the number of parameters taken into account). The connection between a particular class and a particular pattern is established when working with a leader who is a real knowledge holder. The corresponding technique is described in [9]. Since a person describes a situation using natural language means, then situational vector coordinates are linguistic variables. They are used to convert quantitative scales in sensors into linguistic scales used by a person to describe the values of an observed parameter-concept in the form of terms.
A pattern based knowledge base . Let us describe the situation state by a situational vector  , with each coordinate is a linguistic variable xi with a set of terms
, with each coordinate is a linguistic variable xi with a set of terms  . Let us also define a set of classes of situational vector implementations that has a behavior pattern with successful resolution of any class (cluster) situation. At the same time, the values of the specific value by the result exceed a certain threshold level. The same applies to the specific value by the efficiency when implementing the pattern.
. Let us also define a set of classes of situational vector implementations that has a behavior pattern with successful resolution of any class (cluster) situation. At the same time, the values of the specific value by the result exceed a certain threshold level. The same applies to the specific value by the efficiency when implementing the pattern.
Let a set of  patterns be accumulated, each of which is related to a set of situation clusters for which it was chosen. According to the approach described in [11], it is possible to compile a correspondence matrix of situations clusters and the available set of behavioral patterns.
patterns be accumulated, each of which is related to a set of situation clusters for which it was chosen. According to the approach described in [11], it is possible to compile a correspondence matrix of situations clusters and the available set of behavioral patterns.
If we group the matrix rows by patterns, where each matrix row represents a specific situational cluster in which the corresponding pattern is successfully implemented, then we can obtain a typical situation cluster. It will have the same behavioral pattern in structure; the difference will be in the parameter values.
Typically, node microchips have an operating system similar to TinyOS. The analysis of possible options for building a knowledge base in the form of patterns and their modeling in the TinyOS have shown that the most acceptable approach is outlined in [10], so the further discussion will correspond to the paper [10].
Let us number the lines of the pattern block паттерна dj with two indices: the first index is the pattern number (it is also the block number); the second index is the number of the situation included in the j-th cluster.
Such matrix defines a system of logical propositions of the form If ... Then, Else ... For example, the matrix row j.1 is the following proposition:
 (2)
(2)
Else next line expression.
We call the resulting system of logical propositions ordered in this way a fuzzy knowledge matrix or a pattern base.
The algorithms of pattern operation are considered in more detail in [11]. Based on the fuzzy reasoning approaches we present a prompt inference algorithm for choosing a behavioral pattern in a situation corresponding to a typical situation. It is focused both on its autonomous use and on its integration into an onboard intelligent system.
The software implementation of fuzzy logic with linguistic variables is considered in [12].
The article considers the issues related to the implementation of intelligent control systems, a fuzzy controller in particular, and presents a developed software library that allows building fuzzy logical conclusions based on fuzzy sets. All this expands the classical concept of logic by introducing reasoning that is close to the human fuzzy judgment. We propose a software implementation in the form of a linked in library that will allow developers to create their own fuzzy logic knowledge base or fuzzy logic structures from fuzzy sets for projects aimed at modeling human reasoning or developing ICS. This work is the basis for the development of a knowledge base with fuzzy logic based on linguistic variables. As an initial basis in the field of developing intelligent control systems, there are developed classes that support fuzzy calculations and fuzzy logic that help subsequently design knowledge bases that guarantee the achievement of management goals.
So, fuzzy_set in the program implementation is a standard container: map<string, map<double, double>>, where the key is one of the term sets (the fuzzy set name) of a linguistic variable, and the key of the internal map is the x value from the given set of fuzzy set A in domain of the universal set X. The fitness function µA(x) Î [0,1] represents the key value of the inner map.
In order not to add one point at a time to the fuzzy set, we can specify the name of the set and the necessary points in the add_fuzzy_set method:
Ling_var.add_fuzzy_set (“young”, {{0, 1}, {40, 1}, {60, 0}});
A visual display on the diagram requires listing the names of fuzzy sets of interest in the draw_fuzzy_set method:
Ling_var. draw_fuzzy_set(chart1, {“young”, “old”, “old2”});
fuzzy_AND takes only two arguments referring to sets and builds a new fuzzy set based on their fuzzy conjunction by calculating the intersection of lines from two points and comparing a one set point with its value of the function of a line from two points of another set.
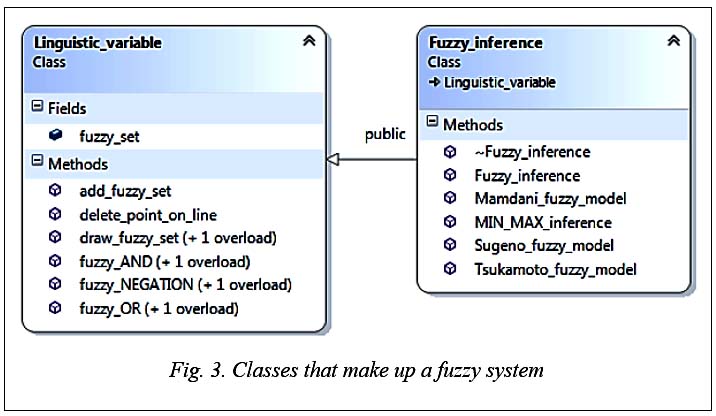
fuzzy_OR also takes only two arguments referring to sets and builds a new fuzzy set based on their fuzzy disjunction by calculating the intersection of lines from two points and comparing a point of one set with its function value of a line from two points of another set.
fuzzy_OR takes one argument referring to a set and builds a new fuzzy set based on the fuzzy negation by subtracting each fuzzy set argument from the membership function unit. [12]
Thus, the use of the results of the above works [5-12] allows developing an autonomous WSN node with the intelligent behavior property, which is able to study the situation and make decisions, both independently (taking into account the data received from other network devices) and in as part of a group. It also has a high level of autonomy and resource saving. Further research will be aimed at the practical implementation of the selected algorithms and methods of WSN intellectualization.
References
1. Akyildiz I.F., Su W., Sankarasubramaniam Y., Cayirci E. Wireless sensor networks: A survey. Computer Networks, 2002, vol. 38, iss. 4, pp. 393–422. DOI: 10.1016/S1389-1286(01)00302-4.
2. IEEE 802.15.4-2003 – IEEE Standard for Telecommunications and Information Exchange between Systems - LAN/MAN Specific Requirements. Pt. 15: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low Rate Wireless Personal Area Networks (WPAN).
3. Pottie G.J., Kaiser W.J. Wireless integrated network sensors. Communications of the ACM, 2000, vol. 43, no. 5, pp. 551–558. DOI: 10.1145/332833.332838.
4. Averkin A.N., Lavrov G.K. The fuzzy smart sensors WSN technology for the intellectualization of decision support systems in wireless sensor networks. System Analysis in Science and Education, 2017, no. 1. Available at: http://sanse.ru/download/278 (accessed November 13, 2021) (in Russ.).
5. Averkin A.N., Lavrov G.K. Creating a high-level general interface for a smart node of a wireless sensor network. System Analysis in Science and Education, 2015, no. 2. Available at: http://sanse.ru/download/239 (accessed November 13, 2021) (in Russ.).
6. Fedunov B.E., Prokhorov M.D. Case-based reasoning in the knowledge bases of onboard intelligent systems. Artificial Intelligence and Decision Making, 2010, no. 3, pp. 63–72 (in Russ.).
7. Vinogradov G.P., Prokhorov A.A., Shepelev G.A. Patterns in autonomous system control systems. Information and Mathematical Technologies in Science and Management , 2020, no. 1, pp. 40–54. DOI: 10.38028/ESI.2020.17.1.003 (in Russ.).
8. Sosnin P.I. Reasoning Modeling. Ulyanovsk, UlGTU Publ., 2000, 74 p. (in Russ.).
9. Fedunov B.E. Tactical Level Airborne Intelligent Systems for Anthropocentric Objects (Examples for Manned Aircraft) . Moscow, De Libri Publ., 2018, 246 p. (in Russ.).
10. Vinogradov G.P. Pattern control system. Software Journal: Theory and Applications, 2020, no. 2, pp. 10–19. Available at: http://swsys-web.ru/en/pattern-control-system.html (accessed November 13, 2021).
11. Vinogradov G.P., Emtsev A.S., Fedotov I.S. Patterns algorithms of an intelligent node as a part of a wireless sensor network. Software & Systems, 2021, vol. 34, no. 1, pp. 33–46. DOI: 10.15827/0236-235X.133.033-046 (in Russ.).
12. Zagibin N.O., Ulyanov S.V. Software implementation of fuzzy logic with linguistic variables. System Analysis in Science and Education, 2021, no. 1, pp. 45–57. Available at: http://sanse.ru/download/426 (accessed November 13, 2021) (in Russ.).
УДК 004.89
DOI: 10.15827/2311-6749.21.4.1
Обзор современных методов интеллектуализации беспроводных сенсорных сетей:
проблемы и перспективы развития
Г.П. Виноградов 1 , д.т.н., профессор, wgp272ng@mail.ru
А.С. Емцев 1 , аспирант, emcev@cps.tver.ru
1 Тверской государственный технический университет, Тверь, 170026, Россия
Предметом исследования статьи являются современные методы интеллектуализации беспроводных сенсорных сетей (БСС), область применения которых – это, как правило, неопределенные и плохо формализуемые среды, поэтому достичь желаемой эффективности подобных комплексов возможно, главным образом, путем совершенствования интеллектуальной составляющей их системы управления в целом и отдельным узлом в частности. Однако следует отметить, что существует разрыв между примитивными моделями поведения искусственных сущностей, например, в роевой робототехнике, моделями их взаимодействия и ожиданиями со стороны практики. Ситуация усугубляется требованиями скрытности, миниатюризации, малого энергопотребления. На практике требуется в качестве мота сети иметь автономный узел, который должен обладать свойством интеллектуального поведения, быть способным на изучение обстановки и принятие решений, как самостоятельно с учетом получаемых от других устройств сети данных, так и в составе группы.
В статье выявляются основные требования к автономной работе интеллектуальных БСС. В качестве ключевых факторов выделяются низкое энергопотребление и обмен достоверной информацией о состоянии окружающей среды для формирования корректных решений. Целью статьи является формирование теоретической и математической базы из существующих методов интеллектуализации БСС, отвечающих перечисленным выше требованиям, а также формирование предложений для направления дальнейших исследований с целью применения на практике.
Ключевые слова: беспроводная сенсорная сеть, интеллектуализация, энергопотребление, автономность, нечеткая логика, паттерн, типовая ситуация.
Литература
1. Akyildiz I.F., Su W., Sankarasubramaniam Y., Cayirci E., Wireless Sensor Networks: A Survey, Computer Networks, vol. 38, iss. 4, 2002, pp. 393–422.
2. IEEE 802.15.4-2003 – IEEE Standard for Telecommunications and Information Exchange between Systems - LAN/MAN Specific Requirements. Pt. 15: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low Rate Wireless Personal Area Networks (WPAN).
3. Pottie G.J., Kaiser W.J. Wireless integrated network sensors. Communications of the ACM, 2000, vol. 43, no. 5, pp. 551–558. DOI: 10.1145/332833.332838.
4. Аверкин А.Н., Лавров Г.К. Использование технологии fuzzy smart sensors wsn для интеллектуализации систем поддержки принятия решений в беспроводных сенсорных сетях // Системный анализ в науке и образовании: сетевое научное издание. 2017. № 1. URL: http://sanse.ru/download/278 (дата обращения 13.11.2021).
5. Аверкин А.Н., Лавров Г.К. Создание универсального интерфейса высокого уровня для умного узла беспроводной сенсорной сети // Системный анализ в науке и образовании: сетевое научное издание. 2015. № 2. URL: http://sanse.ru/download/239 (дата обращения 13.11.2021).
6. Федунов Б.Е., Прохоров М.Д. Вывод по прецеденту в базах знаний бортовых интеллектуальных систем // Искусственный интеллект и принятие решений. 2010. № 3. С. 63–72.
7. Виноградов Г.П., Прохоров А.А., Шепелев Г.А. Паттерны в системах управления автономными системами // Информационные и математические технологии в науке и управлении. 2020. № 1. С. 40–54. DOI: 10.38028/ESI.2020.17.1.003.
8. Соснин П.И. Моделирование рассуждений. Ульяновск: Изд-во УлГТУ, 2000. 74 с.
9. Федунов Б.Е. Бортовые интеллектуальные системы тактического уровня для антропоцентрических объектов (примеры для пилотируемых летательных аппаратов). М.: Де Либри, 2018. 246 с.
10. Vinogradov G.P. Pattern control system. Software Journal: Theory and Applications, 2020, no. 2, pp. 10–19. URL: http://swsys-web.ru/en/pattern-control-system.html (дата обращения 13.11.2021).
11. Виноградов Г.П., Емцев А.С., Федотов И.С. Алгоритмы паттернов интеллектуального узла в составе беспроводной сенсорной сети // Программные продукты и системы. 2021. Т. 34. № 1. С. 33–46.
DOI: 10.15827/0236-235X.133.033-046.
12. Загибин Н. О., Ульянов С. В. Программная реализация нечеткой логики с лингвистическими переменными // Системный анализ в науке и образовании. 2021. № 1. C. 45–57. URL: http://sanse.ru/download/426 (дата обращения: 13.11.2021).
Comments