В ряде отраслей, например в авиационно-космической, в настоящее время ощущается нехватка квалифицированных специалистов, способных профессионально управлять сложными техническими системами. Причем потребность в квалифицированных специалистах по некоторым отраслям в ближайшие годы будет только расти. Необходимо учитывать, что процент возникновения особых, внештатных, аварийных ситуаций по причине неверных действий персонала составляет до 80 %. Требуется многократное увеличение производительности учебных центров, в том числе за счет внедрения новых методик подготовки и создания более совершенной тренажерной базы [1].
Составной частью авиационного тренажера (АТ) является система визуализации – тренажерный имитатор, воспроизводящий визуальную обстановку, соответствующую реальной [2]. Для осуществления такой имитации система должна обеспечивать визуализацию высокореалистичных виртуальных сцен большой сложности в реальном режиме времени.
Для системы визуализации определены следующие характеристики:
– визуальные эффекты; определяют тип устройства отображения внекабинной визуальной обстановки (например коллиматорный или бесколлиматорный) и зоны обзора (по горизонтали и вертикали), необходимые, чтобы пилоты видели адекватное изображение из определенной точки;
– окружающая обстановка – метеоусловия; определяет уровень адекватности моделирования окружающей среды и погоды от температуры и давления до полного моделирования грозы и т.п.;
– окружающая обстановка – аэродромы и прилегающая местность; определяет уровень адекватности моделирования и требуемый уровень детализации имитируемого аэродрома и прилегающей местности, включает в себя требования к типовым и специализированным аэродромам, к визуальной обстановке, данным о высоте местности и базам данных EGPWS (Enhanced Ground Proximity Warning System – усовершенствованная система предупреждения опасного сближения с землей);
– прочие характеристики; определяют технические требования для следующих компонентов: система самодиагностики, предназначенная для тестирования аппаратной составляющей АТ, его ресурсов и программных компонентов, система автоматического тестирования, оценивающая адекватность моделирования при определенных условиях и проверяющая полученные результаты на выход за границы допустимых значений, аппаратное обеспечение, система обновления программного обеспечения, система интеграции [3].
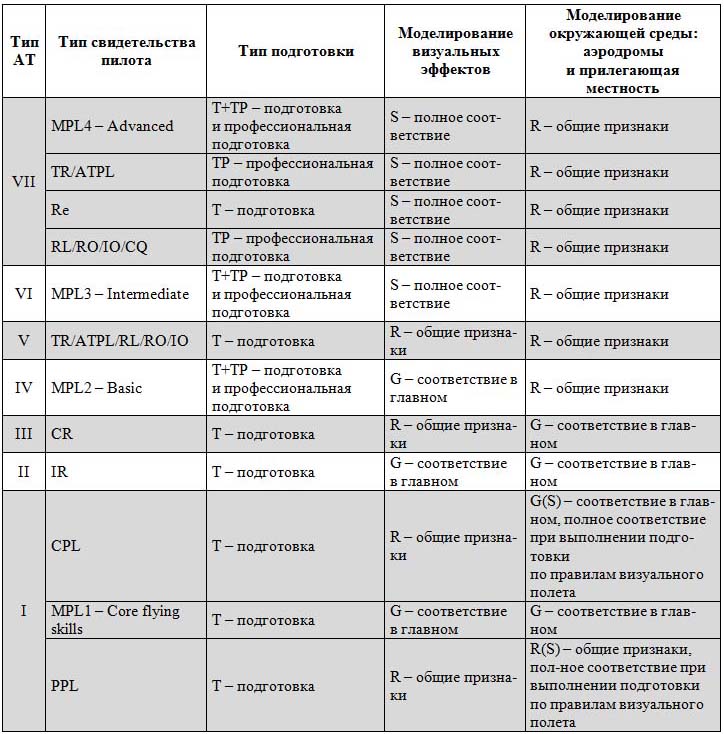
Уровни адекватности моделирования характеристик авиационных тренажеров
Согласно руководству ICAO Doc 9625, выделяются семь типов АТ (см. таблицу). Седьмой тип подходит для отработки всех существующих учебных задач. Далее идут тренажеры без некоторых подсистем (например, без подсистемы подвижности) или с пониженным уровнем адекватности (например, с применением мониторов для отображения внекабинной обстановки).
Для моделирования визуальных эффектов: полное соответствие – воспроизведение реального визуального окружения в перспективе, создание условий для аккомодации глаз на бесконечность; соответствие в главном – моделирование реального визуального окружения в перспективе; общие признаки – общие признаки реального визуального окружения в перспективе, достаточные для выполнения простого полета по приборам, инструментального захода на посадку.
Моделирование окружающей обстановки – аэродромы и прилегающая местность: полное соответствие – воспроизведение реального окружения с максимально возможной точностью для любого заданного места; соответствие в главном – моделирование реального окружения; общие признаки – простое моделирование основных особенностей реального окружения.
Уровни адекватности моделирования характеристик АТ
в зависимости от типа подготовки и свидетельства пилота
Требования к подсистеме визуализации тренажера и проведение объективного тестирования
Ниже приводятся требования к подсистеме визуализации для 7-го типа АТ по классификации ICAO Doc 9625, пригодного для подготовки практически на все типы свидетельств пилота.
Подсистема визуализации должна обеспечивать непрерывную визуальную зону обзора с бесконечной перспективой и текстурированным представлением всех условий окружающей среды для каждого пилота. Горизонтальные и вертикальные зоны обзора должны обеспечивать визуализацию сложных маневров, в т.ч. требующих постоянной видимости взлетно-посадочной полосы (ВПП). Поэтому визуальная зона обзора должна быть не менее 200º по горизонтали и 40º по вертикали.
АТ должен обеспечивать точное воспроизведение виртуального окружения в зависимости от пространственного положения воздушного судна (ВС). Задача оценки визуализации наземного сегмента – продемонстрировать, что система визуализации отображает наземный сегмент, видимый пилотом во время выполнения маневра захода на посадку в соответствии с моделью самолета при сбалансированном состоянии полета, в посадочной конфигурации, в условиях низкой видимости, на высоте 30 м (100 футов) по радиовысотомеру, RVR (Runway Visual Range – дальность видимости ВПП) установлена на 300 м (1 000 футов) или 350 м (1 200 футов).
Обычно для этого теста производится автоматическая установка параметров моделируемого самолета. Изготовитель тренажера предоставляет данные расчетов, в которых указано, какие из посадочных огней должны быть видимыми при заданной видимости на ВПП из этой точки (как правило, видимость составляет 1 000 или 1 200 футов). Очевидно, что результат зависит от геометрии самолета и угла тангажа на конечном этапе захода на посадку, поэтому пилот или другой эксперт, проводящий тест, должен надлежащим образом сидеть в кабине экипажа. Наиболее удаленные посадочные огни могут быть едва видимы, поэтому может возникнуть необходимость выключить освещение в кабине тренажера, чтобы глаза привыкли к яркости экрана. [4]. Существенно влияют на визуализацию внекабинной обстановки следующие параметры:
– дальность видимости на ВПП/видимость;
– точность моделирования глиссады;
– заданная масса, конфигурация и скорость в данной точке, входящие в область эксплуатационных режимов самолета;
– показания радиовысотомера.
Следует обратить внимание на то, чтобы шасси находилось на необходимой высоте относительно точки касания, а не рельефа; в случае неровностей рельефа при подходе показания радиовысотомера могут отличаться от необходимых 100 футов. При использовании обобщенной модели самолета угол обзора по вертикали из кабины экипажа принимается равным 15º. Если используется неоднородный туман, вертикальные вариации горизонтальной видимости должны быть описаны и включены в расчеты видимости наклонной дальности, используемые для вычисления визуального наземного сегмента. Ближняя граница прорисовки: видимые посадочные огни. Ближний край: огни, видимые согласно вычислениям, должны быть видимы и в тренажере. Дальняя граница прорисовки: ±20 % от расчетной видимости наземного сегмента. Видимые огни порога ВПП должны быть визуализированы. Если, согласно вычислениям, входные огни находятся в видимом сегменте, они должны быть видимыми при использовании визуальной системы.
Требуется полностью интегрированное динамическое моделирование окружающей среды, включая точное моделирование атмосферы и погодных условий, таких как грозы, сдвиг ветра, турбулентность, микропорывы и соответствующие типы осадков. Для обеспечения целостности окружающая среда должна быть смоделирована с учетом возможностей конкретного самолета и характеристик подсистемы моделирования.
В АТ необходимо реализовать моделирование стандартной атмосферы. Международная стандартная атмосфера (МСА) – гипотетическое вертикальное распределение температуры, давления и плотности воздуха в атмосфере Земли, которое по международному соглашению представляет среднегодовое и среднеширотное состояние [5]. Цель создания МСА – унификация исходных значений параметров атмосферы, используемых при расчетах и проектировании авиационной техники, обработке результатов геофизических и метеорологических наблюдений и для приведения результатов испытаний летательных аппаратов и их элементов к одинаковым условиям. Основой для расчета параметров МСА служат уравнения статики атмосферы и состояния идеального газа. В ряде стран на базе МСА создаются национальные стандартные атмосферы. В России, например, используется ГОСТ 4401-81 [6].
В АТ должно быть реализовано моделирование сдвига ветра, которое обеспечивает обучение и при необходимости корректировку действий пилота в следующих критических фазах полета: до команды подъема, в момент отрыва, во время набора высоты, на конечном участке захода на посадку – ниже 150 м над уровнем земной поверхности.
Должны быть смоделированы следующие погодные явления, а также предусмотрены соответствующие органы управления параметрами для инструктора: многочисленные слои облаков с настраиваемым основанием, вершиной, зоной покрытия и скоростью перемещения; активация или деактивация грозовых фронтов; видимость и дальность видимости на ВПП, в том числе эффект тумана и неоднородного тумана; эффекты внешнего освещения объекта; влияние на освещение аэропорта (в том числе различную интенсивность и эффекты тумана); моделирование пыли, грязи, загрязнителей поверхности (включая эффект перемещения ветром); эффект переменных осадков (дождь, град, снег); эффекты, связанные с воздушной скоростью в облаках; постепенные изменения видимости при входе и выходе из облака. Должна быть возможность задания следующих параметров: скорость ветра у поверхности, направление и порывы, турбулентность; скорость ветра и направление на средней и большой высоте; микропорывы.
В составе тренажера должны быть представлены конкретные модели аэропорта с топографическими особенностями, с учетом направлений ВПП, разметки, освещения, размеров и рулежных дорожек. Система должна включать не менее трех заданных реальных аэропортов, визуализируемых в условиях дневного и сумеречного (заход или восход солнца) освещения, а также в ночное время. Базы данных виртуальных ландшафтов и EGPWS должны иметь непротиворечивую информацию для возможности проведения тренировок и во избежание CFIT (столкновение с землей в управляемом полете) происшествий. Если на тренажерном устройстве планируется выполнять полеты в условиях ограниченной видимости, по крайней мере, одна сцена с аэропортом должна поддерживать такую функциональность. Например, должна быть возможность визуализации движения по рулежной дорожке в условиях низкой видимости при наличии разметки направления движения, ограждающих проблесковых маячков и необходимого светосигнального оборудования ВПП и посадочного коридора.
Система визуализации должна отображать следующие визуальные эффекты: свечение от мачт освещения; боковые огни ВПП, свечение от посадочных огней в условиях низкой видимости, прежде чем станут видны сами посадочные огни. Требуется воспроизводить визуальные объекты, позволяющие оценить скорость снижения и восприятие глубины при выполнении взлета и посадки, в т.ч. должны отображаться поверхности ВПП, рулежные дорожки, стояночные площадки; особенности местности (рельефа); подробная и точная модель изображения поверхности рельефа в пределах 400 м до ВПП и 400 м после нее, а также область шириной приблизительно 400 м, включающая в себя ВПП.
При оценке степени размытия изображения при движении необходимо продемонстрировать, что размытие изображения не превышает заданных значений, полученных на реальных ВС, и не отвлекают в учебной обстановке. При определении степени размытия изображения, генерируемого системой визуализации, нельзя полагаться только на субъективную оценку наблюдателя. Для получения объективных результатов эксперт должен занять место пилота и воспользоваться соответствующим тестовым шаблоном. Тестовый шаблон – это изображение, состоящее из вертикальных и горизонтальных полос, причем разрывы между полосами от точки обзора представляют угловые интервалы от 1 до 10 угловых минут. Полосы вращаются горизонтально и вертикально относительно точки обзора наблюдателя со скоростью 10 градусов в секунду – это типичная угловая скорость во время руления. Наблюдая за разрывами между вращающимися полосами, следует определить наименьший видимый разрыв. Он должен составлять не более 4 угловых минут. Этот тест обычно выполняется только для проекторов со световым затвором (например ЖК-проекторы). ЭЛТ-проекторы по своей природе обычно практически не дают размытие изображения, что обусловлено принципом их работы.
Система должна обеспечивать возможность воспроизведения визуальной обстановки в условиях светлого времени суток: полноцветное представление и достаточное количество поверхностей с соответствующими текстурами для визуального отображения аэропорта, ВПП и близлежащих территорий. Тени на поверхностях должны соответствовать расчетному положению солнца. Система должна обеспечить отображение 16 одновременно движущихся объектов. Движущиеся объекты должны иметь 6 степеней свободы и двигаться во время теста. Не менее 10 000 видимых текстурированных поверхностей, 6 000 огней, 16 движущихся моделей должны отображаться одновременно.
Система должна поддерживать отображение визуальной обстановки в условиях сумерек, со стандартными объектами, такими как поля, дороги и водные объекты, с адекватной имитацией цветов в условиях низкой освещенности. Кроме того, необходимо отображать объекты, освещенные бортовыми источниками света (например посадочными огнями). Общая детализация сцены должна быть сопоставима с детализацией изображения, созданного из 10 000 видимых текстурированных поверхностей и 15 000 видимых огней. Система должна обеспечить отображение 16 одновременно движущихся объектов. Сцены должны включать самоосвещаемые объекты, такие как улично-дорожные сети, освещение стоянок и световая маркировка аэропорта, необходимые для успешного захода на посадку, приземления и движения ВС по аэродрому. Система должна отображать различимый горизонт.
В ночном режиме система должна обеспечивать все возможности отображения сцены в сумерках, как это определено выше, с добавлением функционала визуализации окружающей обстановки с уменьшенной яркостью, которая скрывала бы ориентиры на земле, не имеющие самоосвещения или не освещаемые бортовыми огнями (например посадочными). Движущиеся объекты должны иметь 6 степеней свободы и двигаться во время теста. Не менее 10 000 видимых текстурированных поверхностей, 15 000 огней, 16 движущихся моделей должны отображаться одновременно.
Задача оценки возможностей системы в режиме день/сумерки/ночь – продемонстрировать, что система создает необходимое число текстурированных поверхностей, огней и одновременно движущихся объектов. Демонстрация выполняется с помощью визуальной сцены, рендеринг которой выполняется с помощью тех же режимов генерации изображений, что используются во время отображения сцен в целях обучения. Как правило, на тестовом изображении огни и текстурированные поверхности расположены в виде матрицы, и это облегчает их подсчет.
Модели аэропорта должны включать в себя типичные стационарные и динамические помехи, такие как телескопические трапы аэропорта, самолеты и оборудование наземного обслуживания. Данные об аэропортах, используемых в системе, должны обновляться, чтобы они соответствовали реальным аэропортам.
Для обучения на АТ в условиях ограниченной видимости система должна включать в себя, по крайней мере, один аэропорт с функциональностью, необходимой для соответствия уровню тренажера. Например, визуализация ограниченной видимости рулежных дорожек, указателей, упоров, огни ограждения ВПП, зоны подлета и светосигнального оборудования ВПП. Задача оценки возможностей системы – продемонстрировать, что система создает не менее 3 500 видимых текстурированных поверхностей, 5 000 источников света, 16 движущихся моделей. Демонстрация осуществляется с помощью визуальной сцены, рендеринг которой выполняется с помощью режимов генерации изображений, используемых и во время отображения сцен в целях обучения. Как правило, на тестовом изображении огни и текстурированные поверхности расположены в виде матрицы, что облегчает их подсчет. Движущиеся объекты должны иметь шесть степеней свободы и двигаться во время теста. Требуемое количество поверхностей, огней и движущихся моделей должно отображаться одновременно. Возможности нужно продемонстрировать в трех режимах [7]: день, сумерки и ночь.
Литература
1. Решетников В.Н., Мамросенко К.А. Основы построения тренажерно-обучающих систем сложных технических комплексов // Программные продукты и системы. 2011. № 3. С. 86–90.
2. ГОСТ 21659-76. Тренажеры авиационные. Термины и определения. М.: Изд-во стандартов, 1976.
3. Organization I.C.A. Doc 9625-AN/938 Manual of Criteria for the Qualification of Flight Simulation Training Devices. Montreal, Canada, Intern. Civil Aviation Organization, 2009.
4. ГОСТ 26121-84. Системы инструментального захода самолетов на посадку радиомаячные. Термины и определения. М.: Изд-во стандартов, 1984.
5. Международная стандартная атмосфера. URL: http://dic.academic.ru/dic.nsf/enc_tech/2697/%D0%9C%D0%B5%D0%B6%D0%B4%D1%83%D0%BD%D0%B0%D1%80%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F (дата обращения: 20.02.2014).
6. ГОСТ 4401-81. Атмосфера стандартная. Параметры. М.: Изд-во стандартов, 1981.
7. RAeS. Aeroplane Flight Simulation Training Device Evaluation Handbook, volume I. London: The Royal Aeronautical Society, 2009.
Comments