Опыт локальных войн и конфликтов показал, что тактика действий средств воздушного нападения (СВН) противника при подавлении системы противовоздушной обороны (ПВО) предполагает применение тактических самолетов, вертолетов и крылатых ракет на малых и предельно малых высотах в имеющихся разрывах радиолокационного поля (РЛП) [1].
В связи с этим оценка боевых возможностей радиолокационных средств (РЛС) по обнаружению СВН-противника на малых и предельно малых высотах является важнейшей задачей, которую предстоит решать при планировании боевого применения частей и подразделений радиотехнических войск (РТВ) и построении систем ПВО объектов.
Процесс планирования боевого применения трудоемкий и при проведении расчетов требует больших временных затрат. Фактор времени оказывает решающее влияние на содержание и качество подготовки частей и подразделений к боевому применению [2].
Традиционные методы и способы оценки боевых возможностей РЛС по обнаружению воздушных объектов, которые уточняются многократными облетами авиации, при всех их недостатках все же находят практическое применение в войсках [3]. Однако в тех случаях, когда требуется оценить возможности по обнаружению воздушных объектов над сопредельными государствами или совершить маневр на новую позицию, изменить боевой порядок, а также при жестком ограничении по времени надо использовать более совершенную методику, основанную на применении ЭВМ, с привлечением картографической информации, заложенной в цифровые карты местности. В этом и заключается актуальность данной темы [4].
Быстродействие ЭВМ по проведению математических расчетов позволяет учесть гораздо большее количество различных факторов, условий и зависимостей, характеризующих боевое применение, существенно повысить точность и достоверность полученных результатов, а следовательно, обоснованность и эффективность принимаемых решений.
Поэтому одной из важных задач является разработка метода поддержки принятия решения при планировании боевого применения частей и подразделений РТВ для оценки боевых возможностей РЛС по обнаружению воздушных объектов с учетом влияния рельефа и с использованием цифровой картографической информации [5].
Конфигурация зоны обнаружения РЛС в районе нахождения целей определяется характеристиками диаграмм направленности передающей и приемной антенн, высотами их центров масс (положением фазового центра) над поверхностью Земли и условиями (амплитудами и разностью фаз) сложения прямой волны, распространяющейся по пути РЛС–цель, и волны, отраженной от земной поверхности в области отражения. Эти две волны имеют различную амплитуду вследствие как разных коэффициентов усиления антенн под соответствующими углами места, так и отличающегося от единицы модуля коэффициента отражения земной волны от поверхности. Сдвиг фаз между волнами определяется разностью проходимых ими путей и изменением фазы земной волны за счет отражения от поверхности [6].
В данной методике предлагается представлять поверхность в виде совокупности элементов простой формы. Для учета влияния подстилающей поверхности необходимо аппроксимировать ее кусочно-плоскими поверхностями, каждая из которых является касательной к реальной поверхности. Такое представление хорошо согласуется с представлением информации в цифровых картах местности.
Рельеф местности в цифровых картах местности задается линиями равных высот. Участок местности между такими линиями аппроксимируется площадками (элементарными участками местности (ЭУМ)). Так, в открытом формате цифровой информации о местности рельеф местности представлен матрицей высот.
Радиофизические свойства можно определить из семантической информации, заложенной в цифровые карты местности, а размеры ЭУМ определяются применяемым масштабом карты и степенью неровности поверхности.
При разработке модели необходимо стремиться полно и достоверно использовать все имеющиеся данные цифровых карт местности, не вводя дополнительные погрешности в результаты расчета.
Таким образом, исходными данными для данной модели подстилающей поверхности, получаемыми из цифровых карт местности, служит информация
– о рельефе местности;
– об электрических свойствах поверхности (лес, почва, болото, море и т.д.);
– об объектах, расположенных на местности (линии электропередач, строения и т.д.).
В общем случае ненормированная диаграмма направленности антенной решетки определяется соотношением
D(ψ, φ) = Dг.в. (ψ, φ)*Крефл (ψ, φ)*Кгор (ψ, φ)*Кверт (φ)*Кз (ψ, φ),
где D(ψ, φ) – диаграмма направленности излучателя; Крефл, Кгор, Кверт, Кз – множители (функции азимута ψ от плоскости излучателя или антенны, φ – угла места от нормали), учитывающие рефлектор, формирующие свойства горизонтального ряда излучателей и вертикального ряда излучателей с учетом влияния Земли [7].
Индексы «в» и «г» в последующем будут относиться, соответственно, к вертикальной и горизонтальной поляризациям излучения излучателей (диполей).
Диаграмма направленности горизонтального симметричного вибратора:

вертикального симметричного вибратора:
где l – половина длины вибратора, L = 2*1 – полная его длина.
Для полуволновых вибраторов
B o6oиx случаях множитель рефлектора
Крефл (ψ, φ) = 2 cos [π*(1-sinψ*cosφ)/4],
а множитель горизонтального ряда из n элементов
![]()
где d – расстояние между горизонтальными элементами; Λ – длина волны.
При начальной установке луча антенны по азимуту под углом φ0 от плоскости антенны
![]()
Для свободного пространства множитель вертикального ряда вибраторов
![]()
где m – число элементов фазированной антенной решетки по вертикали (этажей), S – расстояние между этажами.
При произвольных параметрах Земли множитель вертикальной решетки с учетом отражения от Земли [8] может быть представлен в виде

где а = sin [π*(sinφц – sinφ0)*m*s/λ], sin [π*(sinφц – sinφ0)*s/λ];
в = sin [π*(sinφцз – sinφ0)*m*s/λ], sin [π*(sinφцр – sinφ0)*s/λ] (φц и φцз – углы места цели и земного луча на цель относительно фазового центра антенны);
Rсф, Кш, Кл – множители модуля коэффициента отражения радиоволн от Земли за счет сферичности, шероховатости поверхности и распространения радиоволн через лес в районе отражения от Земли;
∆Bpx и Вв.г. – сдвиги фаз радиоволн за счет разности хода и отражения от Земли.
В общем случае комплексные коэффициенты отражения радиоволн от гладкой поверхности Земли (границы раздела двух сред воздух-земля) определяются формулами Френеля соответственно для вертикальной и горизонтальной поляризаций [8]:
![]() – угол скольжения (падения луча и отражения);
– угол скольжения (падения луча и отражения);
eг – диэлектрическая проницаемость земной поверхности;
sг – проводимость земной поверхности.
Учет сферичности земной поверхности значительно сложнее, так как точные формулы ее влияния на изменение разности хода лучей и на модуль коэффициента отражения в явном виде не получены.
Влияние сферичности поверхности на разность кода лучей до цели [10] может быть оценено по формулам:
При этом углы падения лучей на Землю и отражения от Земли определяются соотношениями,
D1 – дальность до цели по поверхности Земли;
Dн – наклонная дальность до цели;
Нц, На – высота фазового центра антенны и высота цели;
рэ = 8500 км – эквивалентный радиус Земли при стандартной рефракции радиоволн;
Dпв – дальность прямой видимости (при угле места, соответствующем радиогоризонту).
Множитель коэффициента отражения от Земли за счет сферичности определяется соотношением
где X = На / Нц при На < Нц, X = Нц / На при На > Нц.
Разность фаз сигналов за счет разности хода лучей определяется соотношением с длиной волны:
![]()
Для определения множителя коэффициента отражения за счет шероховатости земной поверхности может быть использован результат, полученный Аментом [10]:
![]()
где ![]() – угол падения (отражения); hш – среднеквадратическое отклонение распределения неровностей поверхности, примерно равное трети высоты отклонения неровностей от вершины до основания (в предположении синусоидальной формы отклонения).
– угол падения (отражения); hш – среднеквадратическое отклонение распределения неровностей поверхности, примерно равное трети высоты отклонения неровностей от вершины до основания (в предположении синусоидальной формы отклонения).
Изменение коэффициента отражения радиоволн за счет поглощения в лесном массиве в районе отражения может быть определено, по крайней мере, для верхней части рассматриваемого диапазона частот с учетом эмпирической зависимости затухания в лесах, при которой для углов ![]() его величина будет выражаться формулой
его величина будет выражаться формулой
![]()
где Нл – высота леса в районе отражения радиоволн от земной поверхности; f = 300/λ – рабочая частота РЛС в МГц [9].
При оценке возможности обнаружения целей необходимо учитывать ослабление сигналов при распространении до цели и обратно, которое определяется как Wц дб.м2 = 142 + 401gDц км,
где Dц – дальность до цели.
Условия обнаружения целей определяются из уравнения радиолокации и при когерентном режиме работы РЛС в логарифмической форме задаются соотношением
![]()
где в логарифмических единицах
Ри, .png) и, Fп – мощность, длительность и частота повторения импульсов РЛС;
и, Fп – мощность, длительность и частота повторения импульсов РЛС;
Ткн – время когерентного накопления;
Кпотерь – величина потерь за счет неоптимальности обработки сигналов и их прохождения в трактах РЛС;
Рап – суммарная мощность активных естественных и преднамеренных помех в полосе 1 Гц;
qалгор – пороговое отношение сигнал/шум алгоритма траекторного обнаружения с учетом особенностей его построения;
![]() ц – эффективная площадь рассеяния цели под соответствующим ракурсом наблюдения;
ц – эффективная площадь рассеяния цели под соответствующим ракурсом наблюдения;
Gпрд, Gпрм – коэффициенты направленного действия передающей и приемной антенн (с учетом коэффициентов усиления излучающих и приемных элементов и количества таких элементов на прием и передачу).
Для учета влияния отражений от Земли и положения целей в диаграммах направленности дальность обнаружения будет изменяться в соответствии с выражением
![]()
Для учета рельефа местности вся поверхность разбивается на ЭУМ (соответствует матрице высот, построенной по цифровой карте местности). Данные о высотах считывают из матрицы высот. Производится имитация горизонтального полета цели на заданной высоте Нц, начиная от РЛС, с некоторым шагом по дальности (равен шагу матрицы высот) ∆d. Для каждого i-го шага по дальности рассчитывается угол закрытия, создаваемый местными предметами в направлении на цель:
где Hmni – высота местного предмета, создающего угол закрытия для РЛС;
dmni – удаление местного предмета от РЛС;
Ha = hпоз + ha – высота антенны (hпоз – высота позиции, ha – высота электрического центра антенны РЛС относительно позиции).
Для дальности dmni определяется значение угла места цели:
![]()
Высотная поправка ![]() необходима для учета влияния кривизны земной поверхности [11].
необходима для учета влияния кривизны земной поверхности [11].
Если ![]() то рассчитывается дальность обнаружения и проверяется выполнение условия обнаружения цели.
то рассчитывается дальность обнаружения и проверяется выполнение условия обнаружения цели.
Структурная схема представлена на рисунке.
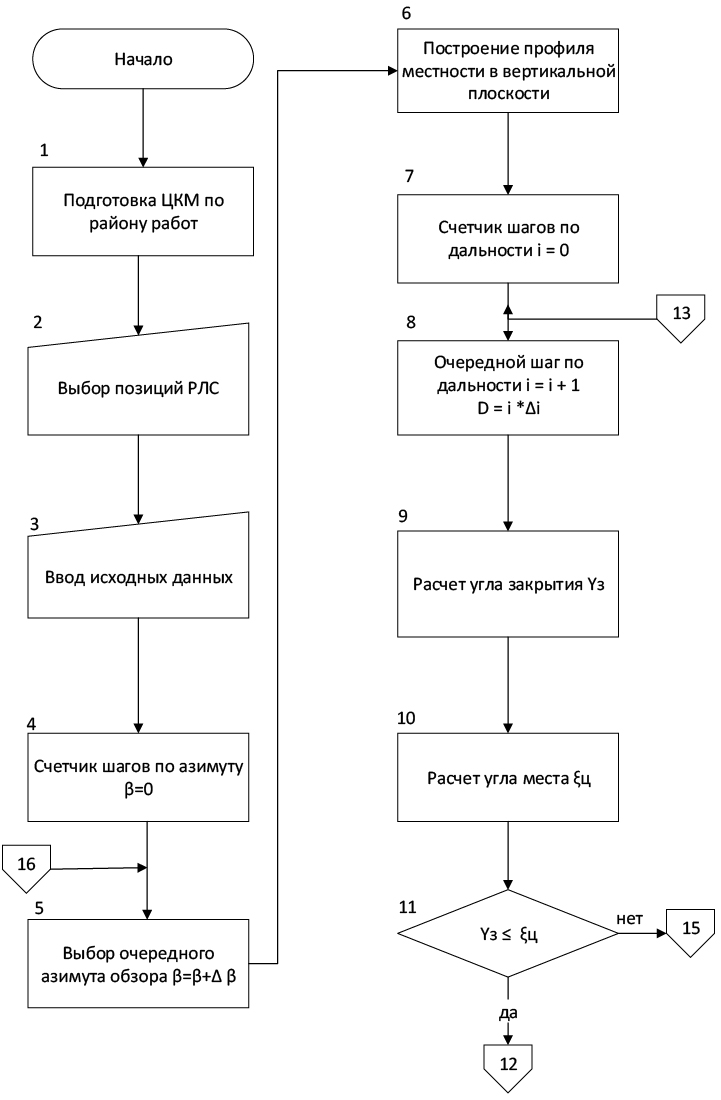
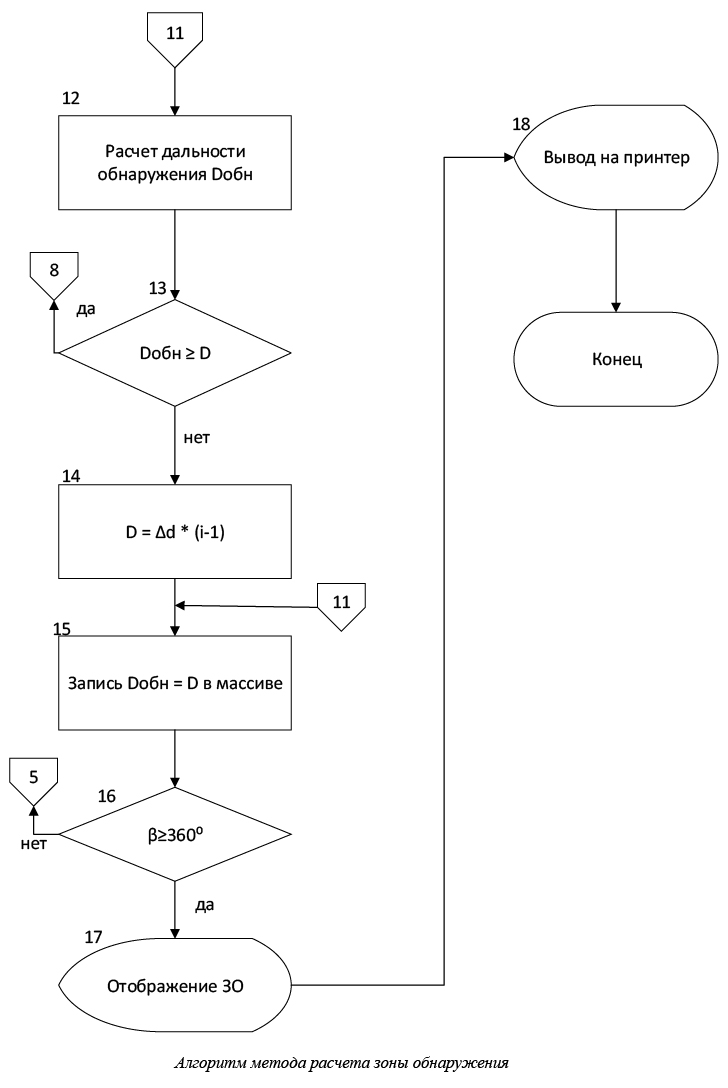
Алгоритм расчета зоны обнаружения состоит из двух вложенных циклов – по азимуту и по дальности [12].
После запуска цикла по дальности на данном азимуте начинаются (с установленным шагом от точки стояния РЛС) расчет углов закрытия создаваемых ЭУМ и сравнение с углами визирования на цель.
При превышении угла закрытия над углом визирования на цель или при достижении максимальной дальности обнаружения цикл прерывается, осуществляется расчет координат точки, ограничивающей зону обнаружения на данном азимуте. Если угол закрытия меньше угла визирования на цель, то из геометрических соотношений определяются углы места прямых и земных лучей, разность их ходов из-за сферичности Земли. Далее определяются векторы модуля и фазы коэффициентов отражения на заданных длинах волн, множители коэффициентов отражения из-за шероховатости и сферичности, на основе которых формируются векторы суммарного комплексного коэффициента отражения от земной поверхности. Для задаваемых положений лучей антенны в зоне обзора определяются нормированные диаграммы направленности антенн.
Полученные данные вместе с энергетическими параметрами РЛС (импульсной мощностью, длительностью и частотой повторения импульсов, временем накопления, величиной потери сигналов при обработке, чувствительности алгоритмов обнаружения и др.) позволяют определить зависимости отношения сигнал/шум, после чего определяется выполнение условий и дальности обнаружения.
Если цель обнаруживается, осуществляется очередной шаг по дальности. На следующем шаге цикла по азимуту это повторяется.
Бурное развитие вычислительной техники и геоинформационных систем (ГИС) привело к качественно новым возможностям их применения, в том числе в интересах оперативной оценки зон обнаружения РЛС с помощью цифровой картографической информации. Возможности ГИС позволяют использовать имеющиеся средства работы с БД (средства доступа к данным, отображения, поиска и т.д.). При этом разработчику программного обеспечения не требуется разрабатывать эти средства заново, а необходимо лишь доведение их до конкретных задач.
Ни один из ранее известных методов использования картографической информации не позволял так полно учитывать влияние географических и других факторов на качество планирования боевого применения частей РТВ, главным образом, с точки зрения оптимального размещения средств обнаружения СВН для формирования РЛП.
Разработанная и программно реализованная методика позволяет рассчитывать зону обнаружения РЛС на ПЭВМ с использованием ГИС.
При этом учитываются рельеф и электрические свойства подстилающей поверхности, ее кривизна и шероховатость, а также основные характеристики РЛС и СВН.
Программа позволяет оперативно построить зону обнаружения одной или нескольких РЛС и тем самым оценить качество формируемого РЛП подразделением или частью РТВ.
Программа разработана с использованием программных интерфейсов ГИС «Карта 2000», в которой используется открытый формат цифровой информации о местности. Этот формат разработан специалистами Топографической службы ВС РФ и утвержден в качестве основного обменного формата цифровой информации о местности в Вооруженных силах и ряде федеральных служб Российской Федерации.
Таким образом, программа позволяет получать достоверные оценки зон обнаружения различных типов РЛС. Программа может применяться в качестве элемента информационной системы поддержки принятия решения, инструмента для научно-исследовательских задач, а также в учебном процессе.
Литература
- Симонов А.В. Геоинформационное образование в России: проблемы, направления и возможности развития. URL: http://e-lib.gasu.ru/ eposobia/gis/3.html (дата обращения: 29.05.2017).
- Псарев А.А., Коваленко А.Н., Куприн А.М., Пирнак Б.И. Военная топография. М.: Воениздат, 1986. 384 с.
- Седов В.Н. О координации работ Военно-топографического управления и Роскартографии // Геодезия и картография. 2003. № 11. C. 4–7.
- Тяпкин В.Н., Фомин А.Н., Гарин Е.Н. [и др.]. Основы построения радиолокационных станций радиотехнических войск. Красноярск: Изд-во Сиб. федер. ун-та, 2011. 536 с.
- Ершов В.В., Соболев И.С. Геоинформационные системы, математический анализ и моделирование. Томск: Изд-во ТПУ, 2009. 16 с.
- Новаковский Б.А., Прасолова А.И., Пермяков Р.В. Точность цифровых фотограмметрических моделей рельефа // Геодезия и картография. 2015. № 2. C. 39–47.
- Лобейко В.И., Макаревич Е.Е., Поляков С.В. Метод определения опорных точек для интерполяции функции, описывающей параметры зоны видимости в вертикальной плоскости РЛС кругового обзора // Изв. ВолгГТУ, 2012. С. 19–21.
- Быстров Р.П., Кузьмичев В.Е., Соколов А.В. Характеристики обнаружения шумовых РЛС // XV Междунар. конф. по спиновой электронике и гировекторной электродинамике: сб. тр. М.: Изд-во МЭИ, 2007. C. 104–16.
- Грудинская Г.П. Распространение радиоволн. М.: Высш. школа, 1975. 280 с.
- Теоретические основы радиолокации; [под ред. Я.Д. Ширмана]. М.: Сов. радио, 1970. 560 с.
- Тетеруков А.Г. Обоснование требований к уровню боковых лепестков ДН антенны для защиты РЛС от активных шумовых помех // Радиотехника. 2008. № 2. С. 35–44.
- Кошелев В.И., Штрунова Е.С. Повышение эффективности алгоритмов защиты РЛС от активных шумовых помех // Вестн. Рязанского гос. радиотехнич. ун-та. 2011. № 3. Вып. 37. С. 27–31.
Comments