Неотъемлемым условием обеспечения исправности сложных технических систем (СТС) является проведение предприятием-изготовителем или техническим органом, отвечающим за поддержание исправности, технического обслуживания и ремонта (ТОиР). Эта задача особенно актуальна, когда оборудование, приобретенное заказчиком и установленное на его территории, не подлежит транспортировке
и демонтажу в ходе обслуживания. В таком случае в соответствии с установленным регламентом или по вызову заказчика представители предприятия-изготовителя должны провести необходимые работы
по месту установки оборудования. При этом специалисты тратят значительное непроизводственное время на проезд к месту установки оборудования и, соответственно, завод-изготовитель несет дополнительные затраты на гарантийное обслуживание либо штрафы в случае несвоевременного выполнения работ специалистами, а потребитель – убытки от простоя оборудования в случае поломки до момента появления специалиста.
Авторы статьи предлагают снизить время простоя стационарных СТС за счет рационального назначения мобильных ремонтно-диагностических комплексов.
В формализованном виде задача выглядит следующим образом.
Требуется определить план (Y) работ бригад (Р), обеспечивающих минимизацию убытков предприятия (Z) при обслуживании объектов (S) в зоне ответственности:
![]() (1)
(1)
S ⊆ Sp, (2)
где S – состав объектов, планируемый на проведение ТОиР;
Р = {р1, р2, ..., рn}– состав бригад различных квалификаций;
Sp – все объекты, обслуживаемые предприятием.
Целевую функцию можно представить выражением
![]() (3)
(3)
где tk(S│Y) – время завершения мероприятий по ТОиР на объекте s∈Sp;
tn(s│Y(P,S)) – планируемое время начала мероприятий по ТОиР на объекте s;
αs – весовые коэффициенты важности объектов s∈Sp.
Планируемое время начала мероприятий по ТОиР определяется установленным регламентом, а также в результате мониторинга технического состояния объектов и определяет ранний срок начала этих мероприятий.
Реальный срок начала мероприятий по ТОиР определяется возможностями предприятия и наличием бригад ТОиР, которые приступают к выполнению мероприятий по мере завершения таковых на предыдущих объектах:
![]() (4)
(4)
где tпр(S,P) – время прибытия p на объект s.
Время прибытия представлено формулой
tпр(p,s) = tосв(p) + τ дв(d(s'), d(p))+ τкомпл (p) + τ дв(d(p), (d(s')), (5)
где tосв(p) – время освобождения p∈P от предыдущих работ;
d(p) – пункт дислокации p∈P;
d(s) – пункт дислокации объекта s∈Sp;
τдв(d(s'), d(p)) – время движения от пункта предыдущих работ d(s') к пункту дислокации p∈P;
τкомпл (p) – время на укомплектование оснасткой p∈P для работ.
С учетом изложенного время завершения мероприятий по ТОиР на объекте S можно представить выражением ![]() (6)
(6)
где τ(s, p) – время работ p∈P на объекте s∈Sp.
Весовые коэффициенты αs, s∈Sp могут определяться экспертным путем с учетом характеристик х(s) объекта [1–3].
При выборе в качестве αs стоимости объектов, то есть αs = c(s), целевая функция отражает упущенную выгоду из-за простоев объектов в неисправном состоянии или стоимость необходимой избыточности
в объектах для компенсации простоев [4].
Сложный характер целевой функции Z не позволяет применить точные методы решения задачи (1), (2), поэтому предлагается приближенный алгоритм ее решения.
1. Ввод исходных данных:
S, P, tпр(p), τ(s,p), tn(s).
2. Сортировка объектов по tn(s):
3. Определение даты окончания мероприятий на объекте s*:
t(s) = tk(s*│Y(s*,P)).
4. Выбор объектов, которые за время выполнения работ на объекте s* начинают нести убытки:
Sy = {s∈S│tk(s│Y(s,P))>tn(s*)}
5. Оптимизационным методом выбирается такое сочетание назначений бригад, отвечающих за ТОиР на данных объектах, которое дает минимальное значение функции (убытков) для всех Sy:
6. Полученное сочетание назначается на объекты.
7. Исключаются Sy из множеств S:
S = S\{Sy}.
8. Если S ≠ ∅, то переход к п. 2.
9. Завершение расчетов. Печать результатов.
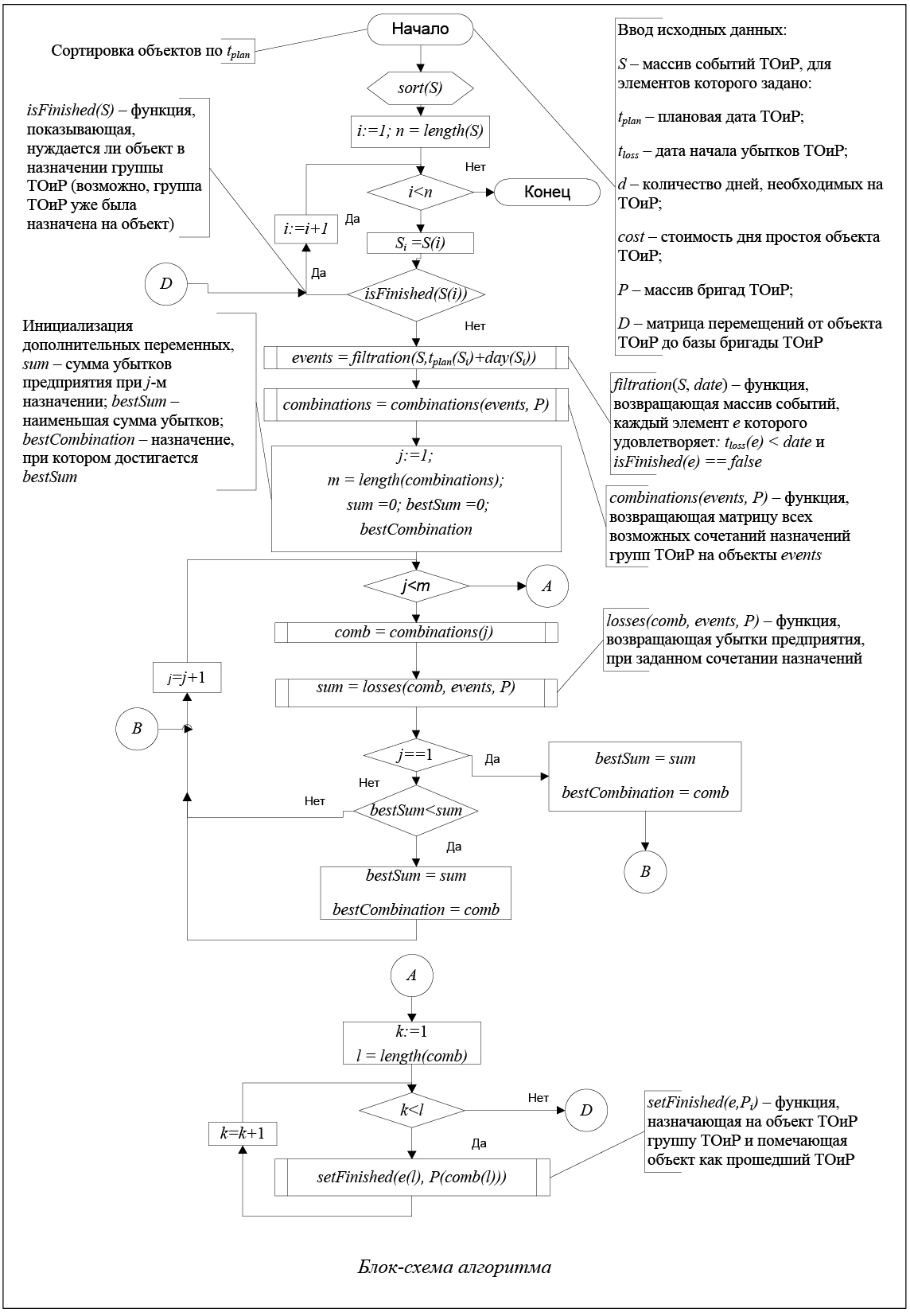
Блок-схема представленного алгоритма представлена на рисунке. Необходимые мероприятия ТОиР сортируются по запланированной дате начала tplan. Далее выбираются те мероприятия ТОиР, ранний срок начала которых меньше даты окончания самого раннего незавершенного мероприятия. Затем вместе
с бригадами ТОиР мероприятия поступают на вход оптимизационной функции, первым шагом которой является формирование возможных назначений бригад ТОиР на мероприятия. Затем, исходя из возможного назначения бригад на мероприятия ТОиР, функция losses(comb, events, P) рассчитывает полученную от данного назначения функцию (убытков), сравнивая ее со значениями от всех возможных назначений бригад на объекты ТОиР. Назначение, при котором функция (убытков) достигает минимального значения, принимается за оптимальное. Исходя из данного назначения, бригады назначаются на мероприятия, а мероприятия помечаются как завершенные и исключаются из расчетов. Далее алгоритм повторяется
с учетом срока окончания занятости бригад на предыдущем объекте.
Алгоритм работы функции losses(comb, events, P).
1. Из множества events выбирается объект ТОиР Ej.
2. Из множества P, согласно заданному сочетанию в comb, на объект ТОиР назначается группа Pi.
3. Исходя из назначенной группы ТОиР, с помощью матрицы перемещений D от объекта ТОиР к месту дислокации группы ТОиР рассчитываются убытки от данного назначения. Формула для расчета:
где D(Ej, Pi) – количество дней, необходимых на путь от базы группы ТОиР до объекта ТОиР;
D(Ek, Pi) – количество дней, необходимых на путь от базы группы ТОиР до объекта, на котором сейчас находится группа ТОиР;
d(Ej, Pi) – время, необходимое группе ТОиР для выполнения работ на Ej;
beween(tloss(Ej), tplan(Ej)) – разница между датой начала убытков предприятия и запланированной датой начала ТОиР.
В случае, если группа не находилась на другом объекте, t(Ek,Pi) = 0, D(Ek,Pi) = 0 Также в формуле присутствует поправочный коэффициент days = 1, который учитывает время на оснастку группы ТОиР необходимым оборудованием на базе.
4. Убытки от каждого назначения группы ТОиР на объект ТОиР суммируются с учетом знака (отрицательные значения в сумме не учитываются).
Алгоритм планирования мероприятий ТОиР, территориально распределенных СТС, программно реализован на языках программирования Java и Javascript [5]. Данная программа может быть интегрирована в информационно-логистическую систему управления процессами ТОиР более высокого уровня.
Литература
- Арепин Ю.И., Смоляков А.А., Допира Р.В., Щербинко А.В. Построение АСУ инженерно-радиоэлектронным обеспечением ВМФ // Ремонт, восстановление, модернизация. 2006. № 4. С. 27–32.
- Допира Р.В., Щербинко А.В., Талалаев А.Б., Ягольников Д.В. Метод планирования применения перспективных средств войскового ремонта и технического обслуживания ВВТ ПВО и ПРО в зоне ответственности // Ремонт, восстановление, модернизация. 2016. № 7. С. 41–43.
- Абакумова Н.А., Кокшарова М.В. Сетевое планирование и управление // Альманах современной науки и образования. 2009. № 9. С. 7–10.
- Гасанбеков С.К., Лубенец Н.А. Сетевое планирование как инструмент управления проектами // Изв. МГТУ «МАМИ». 2014. № 1. Т. 5. С. 21–25.
- Ягольников Д.В., Осипов Р.А., Марголис Б.И., Брежнев Е.Ю., Сергиенко С.В. Программа планирования мероприятий технического обслуживания и ремонта территориально-распределенных объектов. Свид. о гос. регистр. прогр. для ЭВМ 2017613887, зарег. 03.04.2017.
Comments